高分子软材料通常不能兼具低迟滞与强粘接。例如,PDMS等橡胶具有高度的可拉伸性和弹性,但它们不具有粘性;压敏胶具有显著的黏弹性。然而,很多工程应用要求高分子软材料同时具备低迟滞与强粘接;例如,柔性折叠屏由于软材料黏弹性在疲劳弯折工况下产生折痕、脱粘、断裂等失效问题。低迟滞与强粘接之间的矛盾使得软材料在很多新兴技术中应用与发展受到了限制。
近期,南方科技大学的杨灿辉教授团队报告了一种制备超弹性和强粘接聚合物网络的通用方法,这种兼具超弹性和粘性的聚合物网络被称为超弹胶(hyperelastic adhesives,HEAs)。HEAs由黏弹性粘合表面和超弹性非粘合本体组成,其中前者的刚度远小于后者。研究人员通过协调聚合动力学和氧的自由基淬灭来构建聚合相图,揭示了从黏弹性强粘接聚合物网络到超弹性强粘接聚合物网的转变的标度律。用非均相聚丙烯酸丁酯-丙烯酸共聚物网络验证了该方法,实现了迟滞<5%和300 J/m2的粘附能。理论分析和实验结果表明,在临界厚度(即fractoadhesive length,断裂特征长度)以下,HEAs的粘附能-厚度关系是非线性的,这与均匀聚合物网络中的线性关系不同。演示了HEAs作为软机器人的粘贴式抗疲劳应变传感器和电子皮肤的强粘接弹性基底。
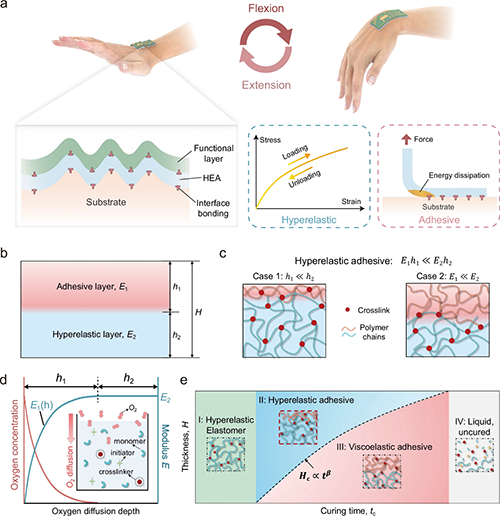
图1HEA的力学原理与合成策略
超弹性和粘附性的结合使HEA在新兴技术中具有吸引力。例如,HEA可以用作可变形基板(如手腕上的人体皮肤)上功能层(如电子设备)的可靠平台(图1a)。在手腕的屈伸过程中,HEA使功能层牢固地锚定在皮肤上,同时保持稳定的性能。从结构上讲,HEA包含一个异质结构,由粘合层和超弹性层组成(图1b)。粘合剂层与长链交联松散,或与大量悬挂链交联不良。通过静力学的力平衡分析,认为梯度表面层的响应可以等同于一个均匀层(图1c),该均匀层的厚度可以通过控制氧气阻聚自由基聚合过程中的氧气扩散的深度来确定(图1d),通过深入探究氧气阻聚动力学中的聚合时间以及HEA总厚度的幂律关系得到聚合相图,分析聚合相图非均相聚合物网络可以是HEA,具有适当定制的粘合剂层和超弹性层的机械和几何性能(图1e)。
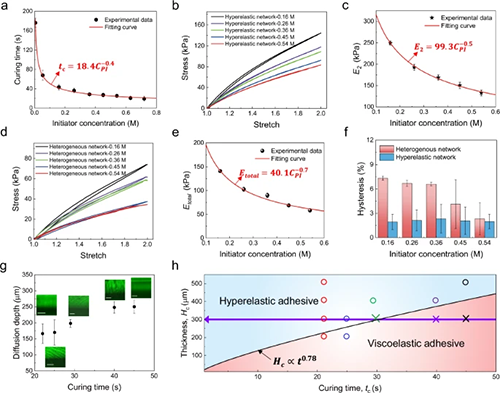
图2(P(BA-co-AA))聚合物网络超弹性的表征
研究人员选择丙烯酸丁酯(BA)和丙烯酸(AA)作为单体,聚乙二醇二丙烯酸酯(PEGDA)作为交联剂,2-羟基-2-甲基丙苯酮(I-1173)作为引发剂(图S4)合成聚丙烯酸丁酯-丙烯酸共聚物(P(BA-co-AA))网络。氧气暴露时间和氧气浓度是影响机械性能的两个关键因素。首先研究氧气暴露时间的影响。由于氧气在聚合过程中起着重要作用,但在固化聚合物网络后影响可以忽略不计,因此固化时间为氧气扩散和抑制设定了必要的时间窗口。通过改变引发剂浓度来调整固化时间,同时将氧气浓度固定在21%(即在开放环境中)。研究人员进行了原位光流变测量,以研究固化时间随引发剂浓度CPI的变化(图S5)。数据很好地符合![]() (图2a)。
(图2a)。
使用均匀的超弹性本体P(BA-co-AA)网络进行了一个加载-卸载张力循环,以研究模量E2和滞后α2随引发剂浓度的变化(图2b)。E2与引发剂浓度有关,因为![]() (图2c)。在空气(21%氧气)中合成了300μm厚的异质P(BA-co-AA)网络,并研究了模量Etotal和滞后α总量随引发剂浓度的变化(图2d)。HEA总体模量Etotal随引发剂浓度变化,
(图2c)。在空气(21%氧气)中合成了300μm厚的异质P(BA-co-AA)网络,并研究了模量Etotal和滞后α总量随引发剂浓度的变化(图2d)。HEA总体模量Etotal随引发剂浓度变化,![]() (图2e)。当引发剂浓度为0.54 M时,超弹性均匀P(BA-co-AA)网络和非均匀P(BA-co-AA。E2和Etotal均被确定为在5%应变范围内通过线性拟合相应载荷曲线数据获得的斜率。
(图2e)。当引发剂浓度为0.54 M时,超弹性均匀P(BA-co-AA)网络和非均匀P(BA-co-AA。E2和Etotal均被确定为在5%应变范围内通过线性拟合相应载荷曲线数据获得的斜率。
在实验中,他们将5%设置为HEA低滞后的临界值,因为常用的弹性硅弹性体PDMS(Dow Coming, Sylgard 184, 10:1)在相同的测试条件下表现出7%的滞后,而超弹性体本体表现出4%的滞后。
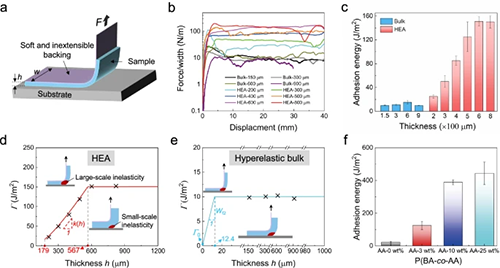
图3(P(BA-co-AA))聚合物网络粘接性能的表征
研究人员将粘合剂表面粘附到丙烯酸酯基材上,另一个表面粘附到柔软且不可拉伸的背衬上(图3a)。剥离力-位移曲线如图3b所示。还绘制了超弹性块体的剥离力-位移曲线。图3c比较了HEA和超弹性块体的粘附能。当样品的厚度小于断裂粘结长度时,会出现大规模的非弹性,断裂过程区会在整个厚度范围内扩展。在这种情况下,由于有效断裂过程区增加,粘附能随着厚度的增加而增加。当样品的厚度大于断裂粘结长度时,存在小规模的非弹性,断裂过程区小于厚度。在这种情况下,由于即使厚度增加,有效断裂过程区也是恒定的,因此粘附能趋于平稳。研究了当厚度低于断裂粘合长度时HEA与均匀超弹性本体聚合物的粘合能-厚度关系(图3d-e)。通过调整化学成分,如AA的含量,可以显著提高HEA的粘附能。
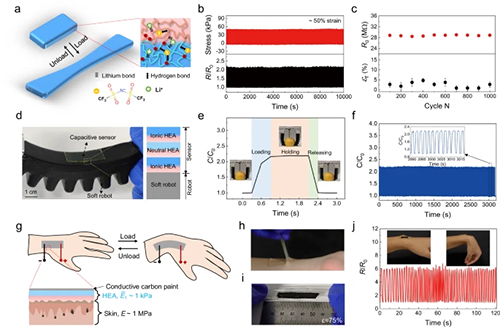
图4HEA的应用展示
在需要柔性可拉伸材料与目标基材实现牢固锚定,同时要求材料具备一致可逆变形能力的应用场景中,HEA充分展现出其独特优势。HEA的应用在需要柔软和可拉伸材料牢固地锚定在目标基材上并一致和可逆地变形的情况下特别有利。研究人员首先演示了离子HEA作为软机器人的粘贴式软电容应变传感器的应用。通过将双(三氟甲磺酰基)酰亚胺锂(LiTFSI)掺入聚合物基质中来合成离子HEA(图4a)在50%应变的循环张力下,离子HEA的应力和电阻在1000次循环中保持稳定(图4b)。基线电阻几乎不变,平均残余应变为2.5%(图4c)。
通过用一层中性HEA夹住两层离子HEA来制造电容式应变传感器,并用它来监测软机器人夹具的变形(图4d)。当抓取器充气(~150 kPa)抓取苹果,保持1.3秒,放气时,传感器会自发地牢固地附着在抓取器上,并相应地捕捉不同的状态(图4e)。传感器的信号保持高度稳定,在1000个操作周期内没有基线漂移(图4f)。作为另一个例子,研究人员展示了HEA作为电子皮肤的皮肤粘合剂和弹性平台。在HEA的表面刷上一层导电碳涂料,并将双层附着在皮肤上(图4g)。HEA的粘合层很软(E1~1 kPa),导电碳涂料是一种塑料液体。因此,双层具有自粘性和保形性,对皮肤变形的干扰可以忽略不计。在双层剥离过程中,皮肤的实质性变形表现出强烈的粘附性(图4h)。图4i显示了双层是可拉伸的,油漆与HEA非常吻合。将双层附着在手腕上,进行循环弯曲,并实时监测电阻。传感器的信号在50个周期内保持稳定,没有基线漂移(图4j),使捕捉运动时,得到的信号具有稳定性与高保真度。
这项研究工作提出了一种由粘性表面和超弹性体组成的异质聚合物网络HEA,其超弹性本体的刚度远高于粘性表面的刚度。通过利用氧气对自由基阻聚的机制,开发了一种简单的一步法合成策略。本工作深入研究了聚合相图、黏弹性粘合剂聚合物网络向超弹性粘合剂网络转变的判据,幂律关系以及HEA的非线性粘附能-厚度的依赖性。最后演示了HEA作为软机器人的粘贴式应变传感器和电子皮肤的皮肤强粘接弹性基板的应用。该工作以“Resolving hyperelasticity-adhesiveness conflict in polymer networks by in situ constructing mechanical heterogeneities”为题发表在《Nature Communications》上(Nat. Commun. 16, 6094 (2025))。文章第一作者是南方科技大学24届博士张平博士和南方科技大学硕士生阮浩伟,共同作者还包括南方科技大学博士生李庆显,何耘丰。该研究得到了科技部重点研发计划青年科学家项目和国家自然科学基金等项目的支持。
该工作是团队近期关于解决聚合物黏弹性与超弹性矛盾性相关研究的最新进展之一。聚合物黏弹性与超弹性的矛盾性往往给柔性电子领域的研究带来极大的困扰。为此,团队发展了制备兼具优异粘接性与超弹性能聚合物的方法(ACS Appl. Mater. Interfaces 2022, 14,49264?49273),并深入研究了在剪切条件下超弹性和强粘接非均相聚合物网络的力学设计原理(Extreme Mechanics Letters, 2025, 102374)。
原文链接:https://www.nature.com/articles/s41467-025-61450-5
- 中山大学付俊教授课题组 Chem. Eng. J.:皮肤启发的低迟滞有机水凝胶多维传感器 2024-10-17
- 中山大学付俊教授团队 Adv. Mater.:低迟滞、耐高低温的有机水凝胶人工触觉 2024-09-12
- 东华大学武培怡/孙胜童/刘凯团队 Adv. Mater.:低迟滞、高韧超分子聚合物离子凝胶 2024-08-31
- 大连理工刘野教授团队 JACS: 聚酮热熔胶实现结构胶级强粘接 - 开启聚酮材料功能新维度 2026-07-13
- 南科大杨灿辉团队 Sci. Adv.:网络-溶剂协同设计实现高弹性与强粘接的凝胶 2026-01-30
- 南科大软体力学实验室 ACS AMI:可拉伸、低迟滞、强粘接胶带 2022-10-11
- 哈佛大学锁志刚院士团队 Nat. Sustain.: 极抗裂纹扩展的天然橡胶网络的力学设计 2025-05-09
