机器触觉系统在智能机器人等领域有十分重要的应用前景。基于柔性传感阵列的人工触觉是机器触觉领域的前沿和热点研究方向。基于水凝胶的应力应变传感器具有柔软可拉伸、仿形度高、贴附性好等优点,可感知力、温度等刺激,成为近年来柔性仿生人工触觉研究的热点。然而,水凝胶受热易失水、受冻易结冰,在高低温等恶劣环境下工作时,往往会丧失传感性能和机械性能;在长期动态载荷下,水凝胶内部结构易破坏,导致机械性能迟滞(Hysteresis)现象,使得传感信号延迟和失真。因此,研究和开发低迟滞、耐高低温的凝胶材料,使其在高低温环境中保持稳定的可拉伸性、韧性以及传感特性,是仿生柔性人工机器触觉研究和发展亟待解决的关键科学问题。
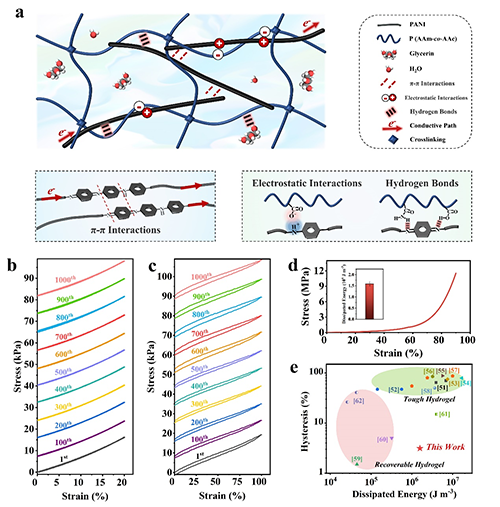
图1 低迟滞高韧性有机水凝胶的结构和力学性能。
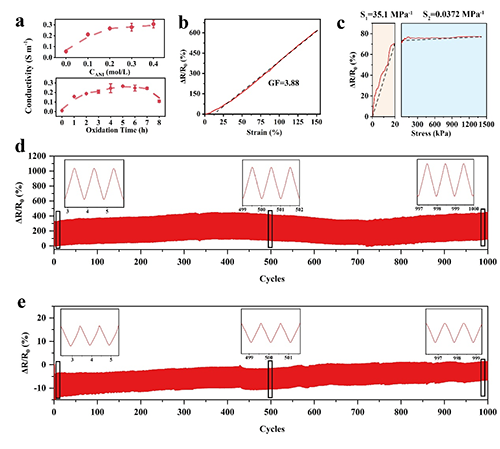
图2 有机水凝胶的应变和应力传感灵敏度和稳定性。
该凝胶采用甘油-水二元溶剂体系,显著降低了冰点和蒸汽压,使有机水凝胶在低温下不结冰、高温下几乎不失水。DSC研究结果表明,凝胶在-100°C~0°C范围凝胶不结冰。在60°C,凝胶的保水率达60%以上。因此,在-18 °C和60 °C环境下,凝胶保持优异的柔韧性(图3a,b)和应力应变传感性能;循环拉伸100次,凝胶传感基线和信号保持稳定(图3c,d)。
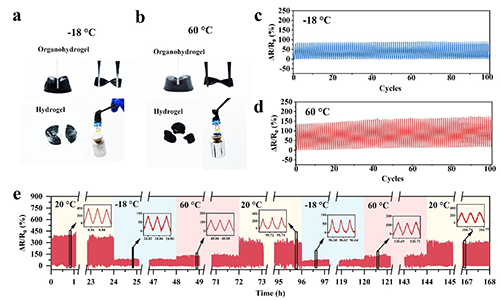
图3 有机水凝胶在高低温环境中保持优异的柔性和传感鲁棒性。
该团队探索了有机水凝胶应变和应力传感阵列在机器人运动感知、手势识别和抓握感知等方面的应用。为了实时监测机械手的运动过程,在手指背安装应变传感阵列(图4a),每根手指的运动导致凝胶传感器拉伸变形、电导率/电阻率变化,产生手指运动状态信号(图4b),信号强度反映了手指的弯曲程度,通过五个通道分别采集五根手指的运动,综合分析信号特征,可识别机械手的运动和手势(图4c)。
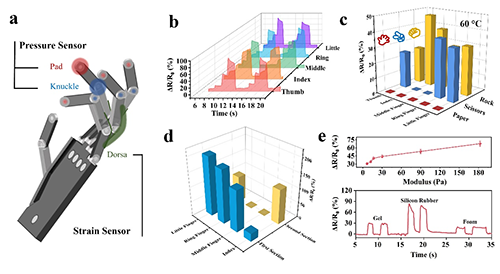
图4 有机水凝胶应变和应力传感阵列用于机械手运动监测和物体感知。
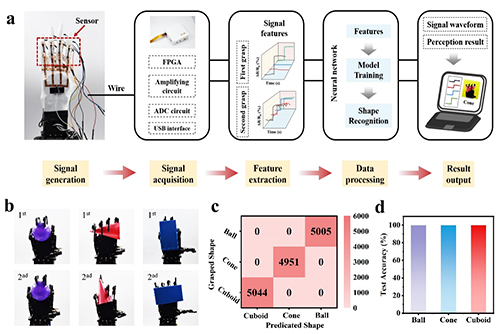
图5 机器学习辅助的人工触觉用于物体形状识别。
该研究工作通过简单的材料结构设计获得了高强韧、低迟滞的有机水凝胶,解决了水凝胶易失水、易结冰、结构破坏而导致丧失性能的难题,使有机水凝胶传感器能够在高低温下长期稳定工作,初步验证了基于该凝胶构建人工触觉的可能性,为研制高性能、长寿命人工机器触觉、推动其在新一代智能机器人领域的应用提供了重要的思路。
全文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202408193
- 南科大杨灿辉团队 Nat. Commun.:提出低迟滞强粘接高分子软材料力学设计原理 2025-07-05
- 中山大学付俊教授课题组 Chem. Eng. J.:皮肤启发的低迟滞有机水凝胶多维传感器 2024-10-17
- 东华大学武培怡/孙胜童/刘凯团队 Adv. Mater.:低迟滞、高韧超分子聚合物离子凝胶 2024-08-31
- 成都大学魏竟江/王清远团队 Adv. Mater.:溶剂交换辅助机械训练制备仿肌腱的抗疲劳导电有机水凝胶 2026-05-09
- 燕山大学焦体峰、秦志辉团队 Macromolecules: 盐析效应与原位聚合协同构筑高强韧环境耐受性导电聚合物有机水凝胶 2025-12-13
- 北航蔡仲雨教授团队《Biosens. Bioelectron.》:光子晶体乙酰胆碱酯酶凝胶传感器高效检测有机磷化合物 2024-10-14
- 黑龙江大学王璐教授 Adv. Sci.:基于壳聚糖忆阻器的具有触觉感知能力的人工触觉神经元 2024-03-25
