南航张浩然/潘蕾课题组 JCIS:倾斜表面上的光驱动液滴爬升与自发固定
2025-03-26 来源:高分子科技
液滴在固体表面的精准操控是微流控芯片、雾水收集、生化检测等领域的核心技术。传统润滑剂注入多孔表面(SLIPS)虽能通过减小阻力实现液滴爬坡,但因表面粘附力过低(滚动角<5°)导致两大难题:1) 液滴运动稳定性差,易受环境振动干扰;2) 液滴无法自发固定,外界能量中断即发生滑落。如何实现液滴在斜面上的可控运动与自发固定,成为制约该技术应用的关键挑战。
该成果以"Controllable lubricant-infused wrinkled surface for light-manipulated droplet climbing/pinning on inclined surfaces"为题,于2025年3月21日发表于Journal of Colloid and Interface Science(中科院大类1区,IF=9.4)。本研究获得国家自然科学基金支持,南京航空航天大学硕士研究生张超恒为论文第一作者,张浩然副教授为通讯作者。
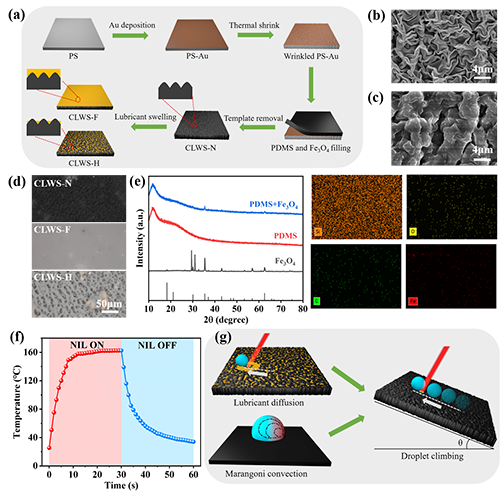
图1. Fe3O4/PDMS薄膜可控润滑剂注入表面(CLWS)的制备与表征。
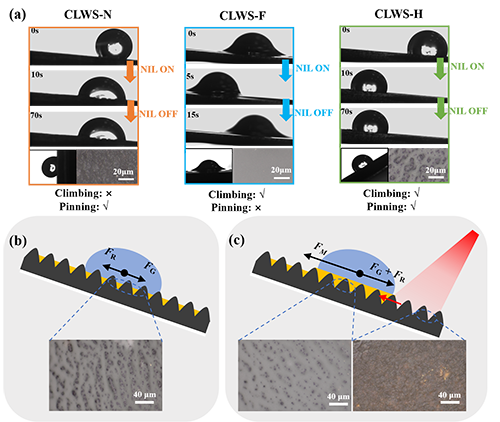
图2. CLWS倾斜表面上光驱动液滴爬升与自发固定。
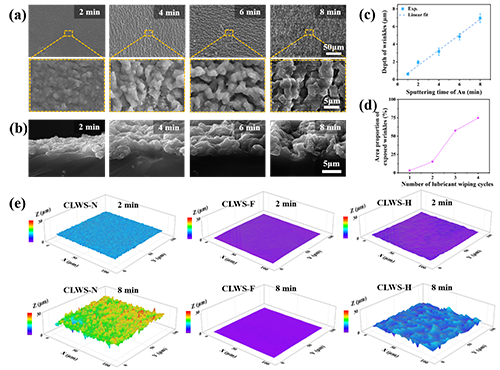
图3. CLWS表面褶皱结构与润滑剂覆盖程度调控。
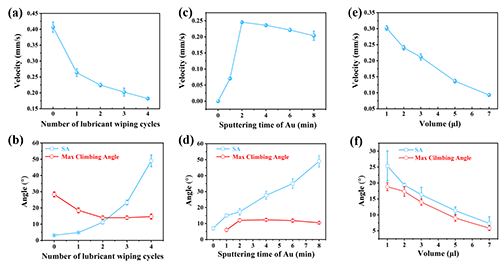
图4. 褶皱结构与润滑剂注入量对液滴爬坡/固定性能的影响。
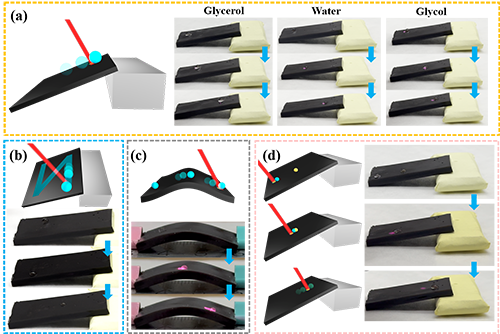
图5. CLWS表面上不同液滴的复杂操控示例。
文章链接:https://doi.org/10.1016/j.jcis.2025.137367
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
