作为一类新型的拓扑结构,机械键(Mechanical bonds)指的是由两个或以上的分子在空间上形成的物理缠结。这类缠结在外界刺激下可以发生非解离的分子内运动,如滑动、转动等,具有丰富的动态性;在未发生共价键断裂的情况下其结构又能保持极高的稳定性。基于这些特点,研究人员已经将它应用于许多领域,如刺激响应材料、软体驱动器、可拉伸电子器件及人造分子机器等。其中,机械互锁气凝胶(Mechanically interlocked aerogels, MIAs)同时具备了机械互锁结构的特性与气凝胶材料的优点,表现出了良好的机械适应性与刺激响应性。尽管如此,如何精准制备由机械互锁网络构成的机械互锁气凝胶仍然是一个挑战。

图1. 通过不同处理过程构筑的机械互锁气凝胶及其网络结构
针对上述问题,上海交通大学化学化工学院颜徐州课题组首先设计合成了具有冠醚/二级铵盐主客体识别位点的轮烷分子,并通过简单的缩聚反应得到了具有机械互锁网络的凝胶材料,干燥后得到了块体的机械互锁气凝胶MIA-1。同时,将湿凝胶乙酰化处理,可以完全破坏机械互锁网络中的主客体识别位点,随后经过相同的干燥处理得到了不具备主客体识别作用的机械互锁气凝胶MIA-2。在破坏主客体识别位点后,轮烷分子的活动性得到了增强,由其构筑的机械互锁网络的动态性也得到明显提升。这种分子尺度的变化最终会被集成放大至机械互锁气凝胶的宏观性能中,使其微观形貌与骨架机械性能等发生改变,表现出智能调控的潜力(图1)。
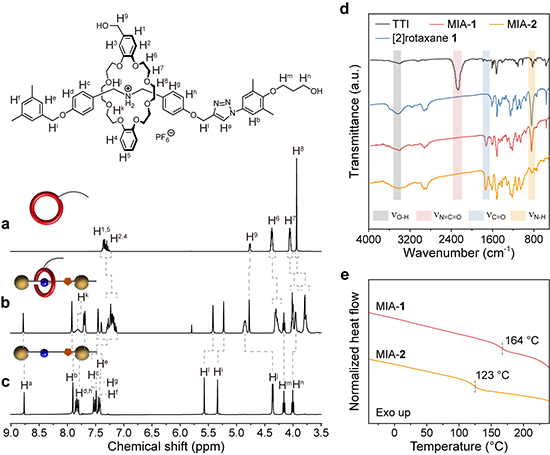
图2. (a–c)轮烷分子的核磁指认,(d) 小分子及MIA-1、MIA-2的红外谱图,(e)MIA-1、MIA-2的DSC曲线
作者首先通过核磁等表征方法证明了轮烷分子的成功合成(图2a–c)。接着利用红外光谱测试中特征峰的变化证明了缩聚单体间的完全反应以及乙酰化前后主客体识别位点的完全破坏(图2d)。通过DSC测试发现,乙酰化后MIA-2的玻璃化转变温度相较于MIA-1明显下降(图2e)。作者推测这是由于轮烷结构中的识别位点破坏后,机械互锁网络的链段活动性增强导致的。

图3. (a–d) MIA-1、MIA-2的扫描电镜图,(e)和(f) MIA-1、MIA-2骨架中纤维结构的直径及分布,(g)和(h) MIA-1、MIA-2的透射电镜图及部分元素分布,(i)和(j) MIA-1、MIA-2的原子力显微镜高度图
随后,作者研究了机械互锁气凝胶的多孔结构形貌。从扫描电镜图可以看出, MIA-1的骨架是由连续的粒子融合构成的类纤维结构,并形成了直径约为几十纳米的孔腔(图3a和图3b)。MIA-2则展示了完全不同的微观形貌特点。这是由于乙酰化使得轮烷结构中主客体识别作用被破坏,机械互锁网络因此具有了更高的动态性,使得凝胶网络中的链段发生重排与聚集,反映在骨架上则表现为纤维结构直径的变粗以及孔径的增大(图3c和图3d)。统计结果表明,其纤维结构直径增大了约2.5倍(图3e和3f)。类似地,透射电镜图(图3g和图3h)与原子力显微镜高度图(图3i和图3j)也证实了机械互锁气凝胶在乙酰化前后发生的骨架结构变化。同时,由MIA-1的元素分布可以看出,所有元素分布的轮廓与其形貌相对应(图3g)。而对于MIA-2,由于乙酰化完全破坏了网络中的二级胺盐识别位点,其PF6–抗衡阴离子会从原本的识别位点附近游离出来。因此其PF6–抗衡阴离子中的元素,尤其是P元素是无规散布的(图3h)。
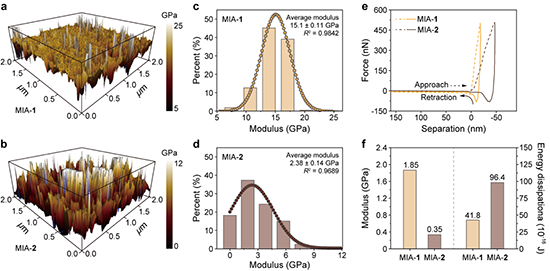
图4. (a)和(b) MIA-1、MIA-2的原子力显微镜三维模量图,(c)和(d) MIA-1、MIA-2的模量分布,(e) MIA-1、MIA-2的原子探针力曲线,(f) MIA-1、MIA-2的弹性模量、能量耗散性质
随后,作者又通过原子力显微镜研究了机械互锁气凝胶的机械性能。通过三维模量图可以发现,MIA-1的平均模量明显高于MIA-2,并且MIA-1的模量分布更为均一,而MIA-2的模量起伏则更大(图4a和图4b)。通过对MIA-1、MIA-2的模量进行统计发现,MIA-1的平均杨氏模量约为15.1 GPa,而MIA-2的平均杨氏模量约为2.38 GPa(图4c和图4d)。这是由于乙酰化过程破坏了二级胺盐识别位点,MIA-2网络中的主客体识别作用随之消失,因此其杨氏模量发生了较大的下降。为了进一步研究机械互锁气凝胶骨架的机械性能,作者通过原子力探针对MIA-1与MIA-2骨架上很小的区域进行了力曲线测试(图4e)。通过拟合结果发现,乙酰化处理使得气凝胶的弹性模量从1.85 GPa下降至0.35 GPa,同时能量耗散由4.18×10–15 J增大至9.64× 0–15 J(图4f)。这说明在这类完全由机械互锁网络构筑而成的新型气凝胶材料中,稠密的机械键对于骨架的机械性能影响极大。而乙酰化作为一种化学刺激手段,不仅能够通过破坏气凝胶网络中的主客体识别位点来调控其微观形貌,还能调控气凝胶骨架的宏观机械性能。
综上,颜徐州团队的工作精准制备了由机械互锁网络构成的机械互锁气凝胶,并基于机械互锁结构的动态性特点,通过乙酰化过程破坏了其网络中的主客体识别位点,成功调控了气凝胶的微观形貌及骨架机械性能。这类化学刺激的调控促进了新型智能响应气凝胶材料的制备与发展,同时也为理解机械键的微观运动与材料宏观性质之间的关系提供了新思路。
上海交通大学硕士研究生罗震是该论文的第一作者,博士后张新海与颜徐州研究员为通讯作者。本工作得到了国家自然科学基金(22071152、22122105和22201177)、上海市自然科学基金(22dz1207603和20ZR1429200)、中国博后基金(2021M692061)和浙江大学上海高等研究院繁星科学基金(SN-ZJU-SIAS-006)的资助。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/anie.202306489
- 天工大孟建强/天理匙文雄 Macromolecules:基于亲水化聚醚砜的分子设计以提高水/盐选择性 2023-03-08
- 华中科技大学谭必恩教授团队 Angew:通过缩聚反应制备三维结晶性共价三嗪框架 2022-01-19
- 上海交大俞炜教授/颜徐州研究员 Angew: 互锁结构赋予机械互锁网络优异力学性能的分子机制研究 2025-02-13
- 上海交大颜徐州课题组 JACS:解析[c2]雏菊链的微观运动与其机械互锁聚合物宏观机械性能间的内在关联 2022-12-26
- 大连理工蹇锡高团队李海龙/张守海、大连工大邹方鑫 AFM:超强聚醚砜气凝胶 - 通过定向冷冻-刻蚀-常压干燥策略实现优异热声绝缘性能 2026-07-09
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 浙江农林大学孙庆丰/武汉大学陈朝吉 Adv. Mater.:纤维素纳米片诱导颗粒纤维化助力陶瓷气凝胶实现超弹性、热防护与电磁屏蔽多功能协同 2026-06-23
