粘附表面广泛存在于自然界以及人类社会中,并且在许多方面都起到了重要的作用。表面粘附的感知是人类指尖的一项重要能力,通常通过接触目标表面及随后的皮肤振动来实现,使得我们可以避免在与粘性表面的物体交互时产生过度黏附、脱离失败的问题。如今机器人抓取功能的快速发展,使得其能够完成与多种物体的交互。然而,在面对具有黏附表面的物体时,如何进行精确的表面粘附感知,智能安全地完成交互任务,仍然是一个挑战。
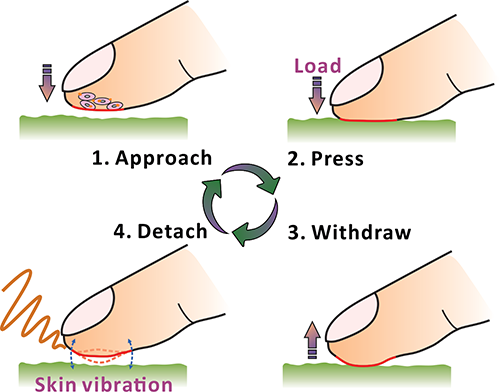
图1. 人类指尖皮肤的粘附传感过程

图2. 微型三维磁化弹簧的柔性及拉伸性展示
有鉴于此,澳门大学周冰朴研究团队通过模拟人类指尖皮肤“压缩-拉伸-回弹”的粘附传感过程(图1),设计出了一种具有轴向压缩和拉伸能力的微型三维柔性磁化弹簧(图2),通过提取回弹时产生的电压峰值以实现对表面黏附力大小的检测。研究发现,当三维柔性磁化弹簧被按压到胶带表面然后收回的过程中(图3),被拉长的三维柔性磁化弹簧会在回弹的过程中产生磁场强度的周期性变化。基于电磁感应定律,这种快速的变化可以被磁化弹簧顶部的导电线圈感知,并输出相应的感应电压信号。通过联立电压峰值与柔性磁化弹簧所受的最大拉力,则可以实现对表面粘附力大小的精确传感(图4)。由于电压的峰值大小与三维柔性磁化弹簧的伸长量有关,研究人员通过改变三维磁化弹簧的刚度(切割参数、初始模量等),实现了对粘附力传感范围、传感灵敏度的自由调控(图5),以适应不同实际应用的需求。实验结果表明,该三维柔性磁化弹簧在多种条件下,都可以实现对表面粘附力大小的精确感知。研究人员亦通过设计相应的应用程式,展示了该三维柔性磁化弹簧可以集成到人的手指或机器人的手臂中,实现表面粘附感知的功能。
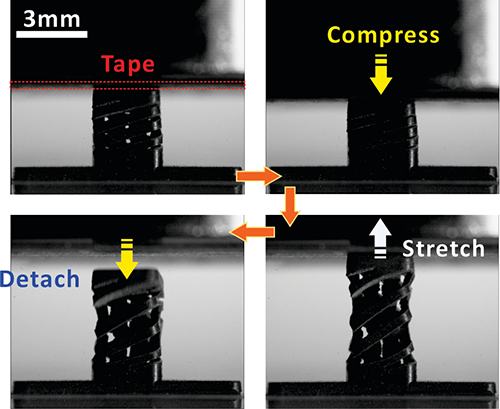
图3.三维柔性弹簧与胶带接触-分离的过程
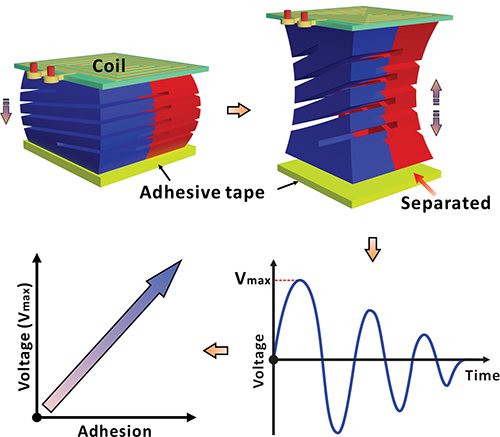
图4. 微型三维柔性磁化弹簧的传感原理
总体而言,该研究通过一种新的制备方法开发了磁耦合三维柔性弹簧结构,可模拟人类指尖的“压缩-拉伸-回弹”动态过程,实现对表面粘附的感知及反馈。该工作系统地研究了各种关键因素对磁化弹簧传感能力的影响,展示了其在穿戴式感知的应用前景;亦有望基于进一步优化,通过与其他触觉传感器设计相结合,为探索未来智能机器人的仿生感应功能提供更全面的平台。
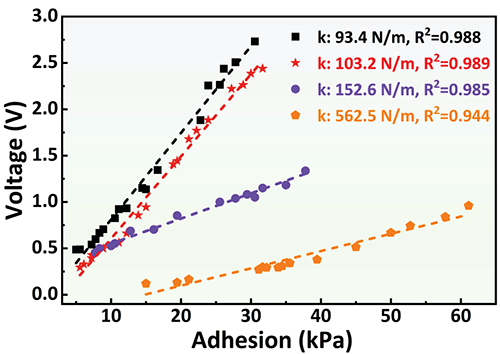
图5. 刚度对传感器灵敏度和传感范围的影响
相关工作以“Bionic Perception of Surface Adhesion via a Magnetized Spring-Like Sensor with Axial Stretchability”为题发表于ACS Nano。文章的通讯作者为周冰朴副教授,澳门大学应用物理及材料工程研究院博士生梁远哲为第一作者。该项研究得到澳门特别行政区科学技术发展基金、广东省科学技术厅和澳门大学的支持,以及五邑大学罗坚义教授和澳门大学周胤宁教授的大力合作与帮助。
原文链接:https://pubs.acs.org/doi/full/10.1021/acsnano.5c07356
- 埃因霍温理工大学刘丹青教授、詹媛媛博士 AM:极性可变的仿生出汗皮肤 2023-01-09
- 中科院兰州化物所材料表面粘附行为研究系列进展 2011-05-18
- 太原理工大学张东光团队 AFM:无沉降液态金属柔性仿生传感器 2022-12-08
- 南洋理工大学《AFM》:在高度可拉伸的仿生感觉神经器件取得新进展 2021-04-13
- 中科院深圳先进院杜学敏副研究员团队综述:仿生传感与驱动材料研究 2019-05-17
