人工肌肉在医疗器械、仿真机器人等领域具有广阔应用前景。液晶弹性体(LCE)因其模量和密度与软组织接近,且能够通过感受外部刺激产生自主运动,是一种非常有潜力的人工肌肉材料。然而,LCE的形状单一,且一旦交联成型就难以改变其形状,为满足不同场景的应用需求,理想的人工肌肉应能够被加工成任意所需形状,即形状编程。此外,LCE的力学模量和强度不足,限制了其在可逆驱动过程中的对外做功能力。由于人工肌肉常被用于提拉和推动物体,因此赋予其优异的对外做功能力至关重要。如何发展兼具可形状编程和优异做功能力的LCE是个重要挑战。
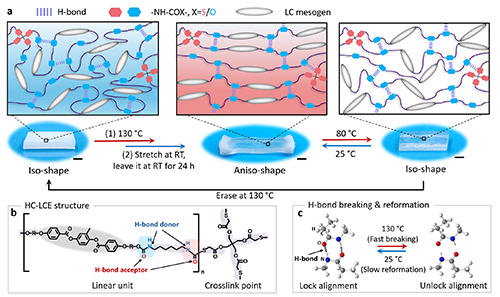
图1. LCE的化学结构、取向及驱动原理
为此,上海交通大学的刘湍和林秋宁等人构建了一种由氢键和共价键交联的LCE(图1)。该材料以氢键作为物理交联固定取向网络,并利用氢键高温快速解离—室温缓慢形成的特点赋予其形状编程功能;同时,以共价交联用于维持结构的完整性,并与氢键一起协同增强材料。基于此设计,我们成功构建了一系列具有不同形状的人工肌肉。这些材料能够在热刺激下发生可逆、稳定、复杂的驱动行为并展现出优异的做功能力(440 kJ m-3)。特别强调,获得该材料须满足以下要求,即具有低相变温度以防止驱动过程中氢键发生解离、引入强氢键用于固定液晶取向。
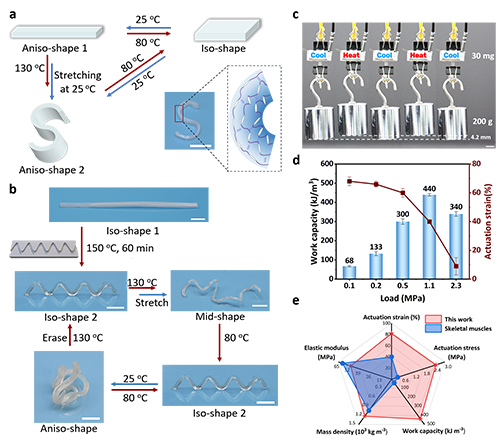
在形状编程方面,具体操作步骤包括(图1a):材料经130 oC热处理使氢键解离,随后使材料降至室温;氢键在室温下缓慢恢复,这为作者提供5 min的加工窗口用于对材料实施拉伸取向;静置24小时后,氢键得到充分恢复,并有效固定取向网络。所得材料在25 - 80 oC的循环热刺激下能够发生稳定、可逆的驱动行为。基于该方法,作者构建了一系列具有不同形状的人工肌肉,如图2所示。在驱动做功方面,作者使用所构建的人工肌肉提拉重物,仅需30 mg材料就能提起自身6000多倍的砝码(200 g)。进一步研究发现,材料的做功能力最高可达440 kJ m-3,远高于人体骨骼肌的做功能力(40 kJ m-3),是已知可编程LCE中最高的。该优异驱动性能得益于非共价与共价交联的协同增强作用。

作者结合所构建材料在形状编程以及驱动做功两方面的优势构建了一种管状软体驱动器,并通过植入电阻丝实现通过电流控制驱动行为。如图3所示,所构建的管状人工肌肉可以发生伸长-收缩、弯曲-伸直、扩张-收缩三种驱动模式。作者将其置于人体模型的手臂关节处,进一步施加电流带动手臂关节以约60°角度进行可逆弯曲-伸直运动。这项工作为制备兼具可形状编程和优异做功能力的LCE提供了一种可行新方法,且材料合成简单,仅需一步熔融聚合完成制备。我们期望该工作能够推动LCE人工肌肉在医疗器械、仿真机器人等领域的实际应用。
相关成果以“Locking Alignment of Liquid Crystal Actuators Using Hydrogen Bonds to Enable Room-Temperature Shape Programmability and Enhanced Work Capacity”为题发表在Advanced Functional Materials期刊上。上海交通大学博士研究生丁健是该论文的第一作者,刘湍副研究员和林秋宁研究员为通讯作者,团队的朱麟勇教授提供了大力支持和悉心指导,本工作得到了国家重点研发计划、国家自然科学基金、交大2030计划、上海市浦江人才项目的资助。
注:欢迎开展合作研究,有意者请来信邮箱(tuan-liu@sjtu.edu.cn)。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202414510
- 清华大学许华平课题组 Matter:可用于多种基材的模块化形状编程方法 2024-01-19
- 上海交大陈玉洁、UCLA贺曦敏团队 Nano Lett.:高强度、光诱导双重形状可编程的共价适应性网络 2022-10-31
- 清华大学许华平教授课题组《Adv. Mater.》:在高分子材料的三维形状光编程领域取得新进展 2021-09-06
