微小型软体机器人是近年来机器人领域的重要分支,在狭小空间工程探索、生物体内药物递送、体内医疗诊断等领域扮演着重要角色。近日,香港城市大学于欣格团队联合大连理工大学解兆谦、北京航空航天大学常凌乾教授,合作开发了一款无源无线的电驱动软体机器人。该软体机器人系统从无线化设计和多功能传感入手,实现了小型化软体机器人在封闭空间中对液体环境的物理、化学和生物各项指标的无线化监测。 研究成果以Battery-free, wireless, and electricity-driven soft swimmer for water quality and virus monitoring(用于水质和病毒监测的无电池、无线、电力驱动的软体游泳机器人)为题,于2024年1月10日发表于Science开放获取子刊Science Advances杂志。

小尺寸机器人有能力在狭小和封闭空间中运动穿梭,因此,小尺寸机器人是在此类场景下(包括生物体内)执行环境监测或生物医学检测的一个理想装置。
为实现此类任务,机器人装置首先需要是无线的,任何绳索的牵绊都会限制其自由运动,这就要求机器人驱动和传感数据读取必须是无线化的;另外,机器人需具备多重传感能力,传感指标的多少关系到机器人监测能力和智能化的强弱;如此多的功能要求往往依靠于在机器人系统之中集成更多的模块,而这势必对机器人的小型化带来挑战。
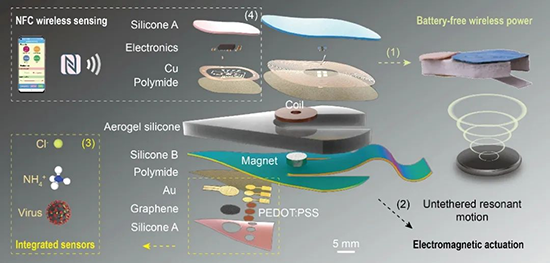
该研究以管道场景为例子,展现了此小型软体机器人系统在封闭环境下对温度、离子和病毒的检测能力。该研究展现了在封闭空间下,机器人驱动的无线化和无电池化,并且无需取出机器人装置即可无线化地读取监测数据。此无线化技术,亦可用于开发体内生物医用软体机器人系统,以实现机器人的体内监测和体内主动医疗功能。
原文链接:https://www.science.org/doi/10.1126/sciadv.adk6301
主要作者简介

于欣格,香港城市大学生物医学工程学系副教授,博士生导师,香港青年科学院院士,香港RGC Fellow,国家优秀青年科学基金(港澳)获得者,《麻省理工科技评论》创新35人。研究方向为新型柔性电子在生物医疗领域的应用。

解兆谦,大连理工大学力学与航空航天学院教授,博士生导师,国家级青年人才项目获得者。研究工作主要聚焦于力学与生命健康前沿交叉领域,面向可延展柔性器件在生物医学应用中的关键科学问题,发展微器件柔性化、一体化、集成化的新型力学设计及理论。

常凌乾,北京航空航天大学生物与医学工程学院教授,教育部长江学者、中组部青年千人计划等项目入选者。研究方向为纳米电穿孔、细胞诊疗、生物芯片、生物传感。

李登峰,香港城市大学生物医学工程学系研究员,主要从事生物医用微纳机器人、软体机器人和可穿戴触觉反馈界面的研究。
- 清华大学赵慧婵团队 AFM:分米尺度的静电驱动柔性人工肌肉新进展 2025-01-18
- 清华大学张如范教授一周连发两篇《Adv. Funct. Mater.》:最新研究进展 2024-12-06
- 北大/北京石墨烯研究院刘忠范、张艳锋和北大杨槐Nano Lett.:基于石墨烯/胆甾相液晶的电驱动型热致变色调光器件的构筑及应用 2023-05-24
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
