作为一种新兴的仿生材料,刺激响应性水凝胶因其灵活的响应能力和多样的调控手段,近年来受到了学者们的广泛关注。然而,现阶段基于刺激响应性水凝胶制备的绝大多数致动器件往往仅能够实现“刺激-形变”的单向致动调控过程,这与有机生命体“识别-判断-执行”的高级智能行为还有较大差距。例如,自然界中的智能生命体可以通过神经系统识别外界环境状况及自身的姿态,进而决定是否进行身体移动;相反,现有柔性致动器件的刺激响应形变过程则缺乏有意识的主观判断,只能在无干扰的理想实验环境下完成可控的致动驱动任务,在复杂环境中的适应性及其自身所展现的智能性仍有待提高。为了实现类生命体“识别-判断-执行”的智能致动过程,柔性致动器不仅要具备灵活可控的致动能力,还要具备对其自身形变过程进行主动识别的自我感知能力。因此,发展兼具致动能力和感知能力的新型柔性致动材料,使其不仅能够在外界环境刺激下产生可控形变,还能够对其刺激响应性形变过程进行自我识别,对实现类生命体“识别-判断-执行”的智能仿生致动器的制备及应用具有巨大的意义。
近日,东北大学理学院王铁强副教授、孟凡宝教授与吉林大学张俊虎教授合作,开发了一种具有仿生自调节性能的半互穿海绵状自感知水凝胶致动器。该工作以温度诱导微相分离聚合的方法制备了海绵状的聚N-异丙基丙烯酰胺(PNIPAM)水凝胶,并进一步在水凝胶内原位氧化聚合导电聚合物聚苯胺(PANI),最终得到半互穿海绵状水凝胶(Sponge-Like semi-Interpenetrating hydrogel, SL-s-IPN hydrogel)。利用PNIPAM自身的热响应性和PANI良好的光热转化能力,在施加不同形状、强度、方向和频率的近红外光后,以该材料制备的柔性致动器均能够在较短的时间内完成弯曲,折叠及光线追踪等多种复杂动作。值得注意的是,导电聚合物的引入使柔性致动器在发生光致形变时能够产生可检测的实时电学信号,进而实现其对自身形变的自我感知。借助于这种高效的电学反馈机制,在连接到由监测器,控制系统等组成的闭环控制系统(Closed Loop Control System, CLCS)中后,柔性致动器能够有效地模仿自然界中智能动物的神经肌肉系统,当环境中出现干扰因素时(干扰光或干扰物),致动器能够迅速地对环境变化情况进行感知和判断并对其自身形变进行自我调节。

图一、半互穿海绵状自感知水凝胶的制备、光致形变过程及闭环控制回路的构建
亮点1:海绵状微观结构赋予水凝胶超快的响应速度和致动行为
本工作利用温度诱导微相分离聚合的方法,制备了海绵状的多孔PNIPAM水凝胶。与常规方法制备的PNIPAM水凝胶相比,该方法制备的PNIPAM凝胶具有更大的比表面积和更为通透的孔结构,其独特的微观结构为水凝胶内部水分子的迁移提供了大量通道,一定程度上降低了传统PNIPAM水凝胶在LCST附近发生相变时皮肤层效应对其响应速度的负面影响。测试结果显示,在去溶胀和溶胀的过程中,海绵状PNIPAM水凝胶(SL-PNIPAM)和半互穿海绵状水凝胶(SL-s-IPN)均能够在5s内和10s内分别达到溶胀平衡,远低于传统PNIPAM水凝胶(N-PNIPAM)达到溶胀平衡的时间(数十分钟甚至数百分钟)。此外,在近红外光刺激下,以SL-s-IPN水凝胶制备的光-热柔性致动器能够在2s内弯曲到最大角度,当近红外光关闭后,致动器能够在1s内恢复到初始角度,展现出了极具特色的快速响应行为。
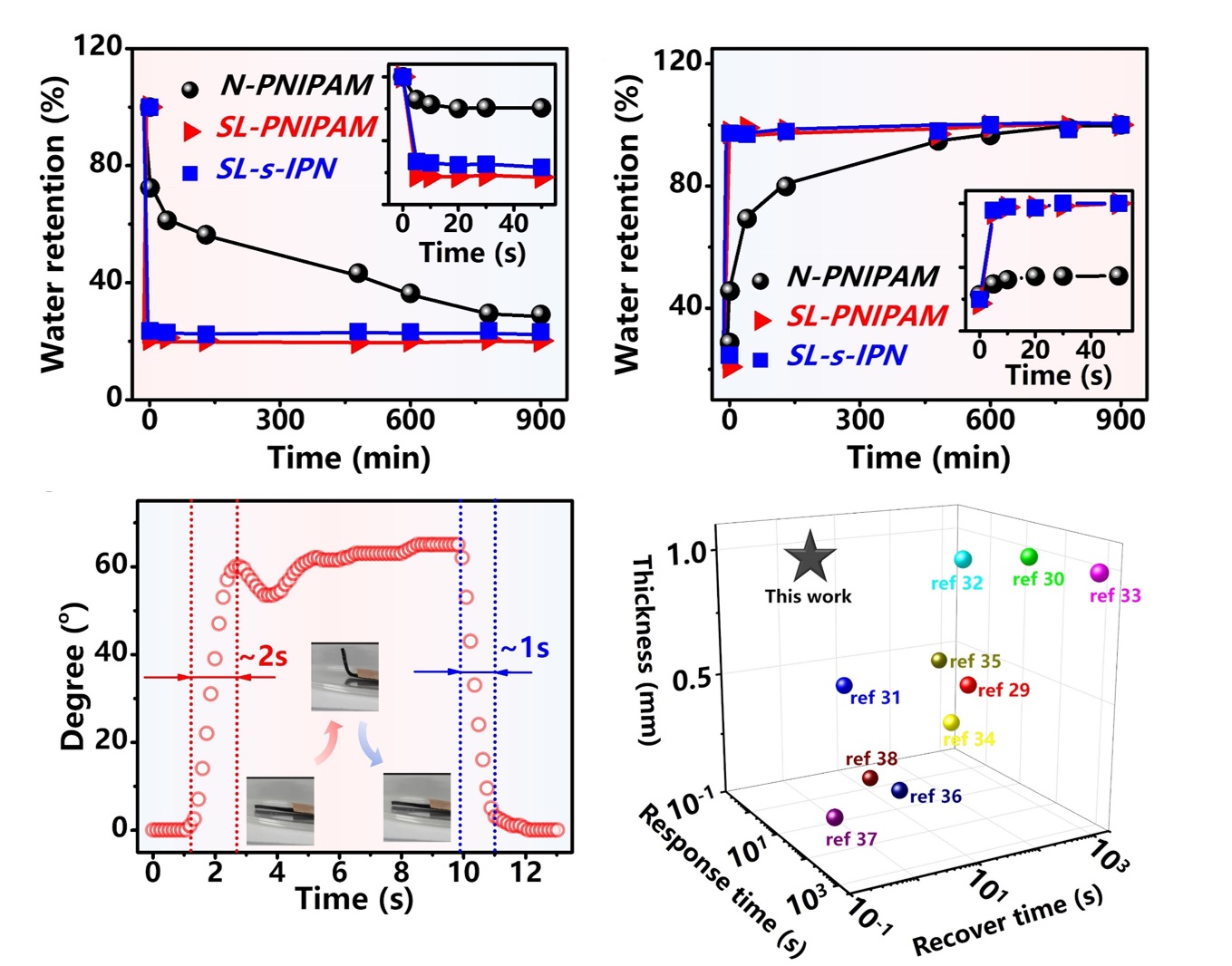
图二、半互穿海绵状水凝胶退溶胀/溶胀动力学测试及柔性致动器响应速度测试
亮点2:半互穿结构带来的低迟滞高灵敏电学自感知性能
本工作利用原位氧化聚合的方式,在海绵状PNIPAM水凝胶中原位聚合导电聚合物PANI,形成了具有电学性能的半互穿海绵状复合水凝胶。在外界光刺激下,当PNIPAM网络发生收缩引起柔性致动器发生形变时,致动器内PANI分子链发生对应的迁移,进而使其电学性能产生了相应变化,最终实现对于自身形变的电学传感。受益于PNIPAM网络与PANI分子链之间独特的半互穿结构,两种聚合物材料能够在接近分子级别的微观尺度上有效复合,因此柔性致动器的形变行为与电学传感信号几乎同时产生。结果显示,柔性致动器的电学传感信号不仅表现出了与其致动行为一致的超快响应速度(响应时间:约2s;恢复时间:约1s),也在100次的测试循环中展现出了良好的循环稳定性及不同刺激强度下的连续测试能力,在柔性致动器的低迟滞电学自感知领域展现出一定的应用潜力。

图三、半互穿海绵状水凝胶致动器的电学自感知性能测试
亮点3:仿生水凝胶致动器自身姿态的快速自调节
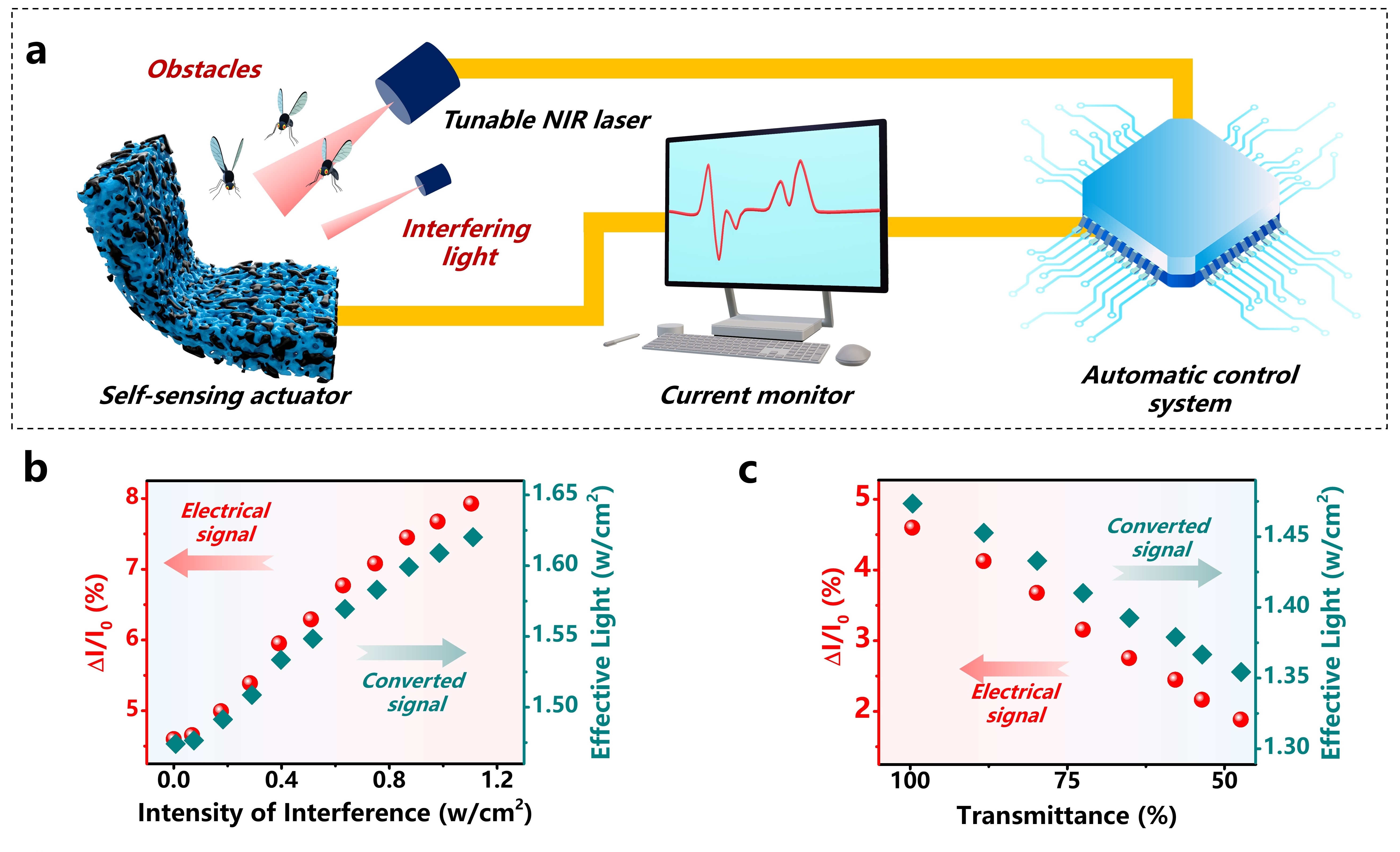
在快速致动能力及无迟滞的电学自感知性能基础上,通过连接到监测器,自动控制系统及可调谐激光器组成的闭环控制回路中,半互穿海绵状自感知水凝胶致动器展现出了与自然界中智能生命体相近的自调节行为。在该回路中,半互穿海绵状自感知水凝胶致动器兼具智能生命体的神经肌肉系统中感受器和效应器的双重作用,其传输的电信号和接收的红外光信号依次模拟生物体的传入神经和传出神经,计算机对柔性致动器反馈的电学信号进行实时监测,自动控制芯片作为中枢神经采集信号并生成相应指令。当环境中出现干扰光或干扰物影响柔性致动器自身的行为姿态时,利用其反馈出的实时电学信号,闭环系统能够在无人干预的情况下对柔性致动器所处的环境情况进行快速判断,并对其自身的行为和姿态进行自主调节,实现柔性致动器在复杂环境中的自适应和自修正。
图四、闭环控制回路中半互穿海绵状水凝胶致动器的自我调节性能
结论:该工作利用温度诱导微相分离聚合和原位氧化聚合,制备了由PNIPAM和PANI组成的半互穿海绵状自感知水凝胶。以该材料构筑成的具有光致形变能力的自感知柔性致动器,表现出高响应速率、高度可编程性及实时自感知等诸多特点。在集成到闭环控制回路中后,自感知柔性致动器能够完成与自然界中智能生命体相接近的实时感知能力和自我调节行为。该材料的制备,为下一代智能软体机器人的设计和制造提供了新的思路。
该成果以“Sponge-Like, Semi-Interpenetrating Self-Sensory Hydrogel for Smart Photothermal-Responsive Soft Actuator with Biomimetic Self-Diagnostic Intelligence” 为题发表在《Chemical Engineering Journal》上。(https://doi.org/10.1016/j.cej.2023.143515)东北大学王铁强副教授、孟凡宝教授与吉林大学张俊虎教授为文章的共同通讯作者。
原文链接:
https://authors.elsevier.com/a/1h6Nj4x7R2gMw1
https://doi.org/10.1016/j.cej.2023.143515
