连续可控的自由变形能力是使软体机器人实现多功能的重要前提。目前,软体机器人实现变形的主要手段为调控薄壳结构的曲率。然而,以往的薄壳类软体机器人还存在无法自由重构曲面或难以承受较大荷载等不足。
近日,加州理工学院Chiara Daraio教授课题组提出了一种可以进行可控三维曲面自由变化的软体机器人,并且展示了其操控荷载的能力。该成果以Robotic surfaces with reversible, spatiotemporal control for shape morphing and object manipulation为论文题目发表在Science Robotics (DOI: 10.1126/scirobotics.abf5116)上。

图1. 自由曲面软体机器人的设计。
该设计由两层主动网格和一层被动网格构成夹心三明治结构,辅以盖板鳞片来构成连续的表面。主动网格由嵌入了加热电阻丝的液晶弹性体材料(LCE)构成,可在通电加热时收缩,起到肌肉般的作用;主动网格的收缩会造成由聚酰亚胺薄膜(Kapton)构成的中间层被动网格的屈曲变形,形成波纹状的支撑结构,起到骨架般的作用。根据电流大小的不同,上下两层主动网格在不同方向的局部收缩变形可以进行实时独立调节。由于对于壳体而言,其曲率取决于上下表面的局部应变,因此这种新型软体机器人可以通过调节输入到上下两层主动网格的电流自由变换曲率,形成各类曲面形状。
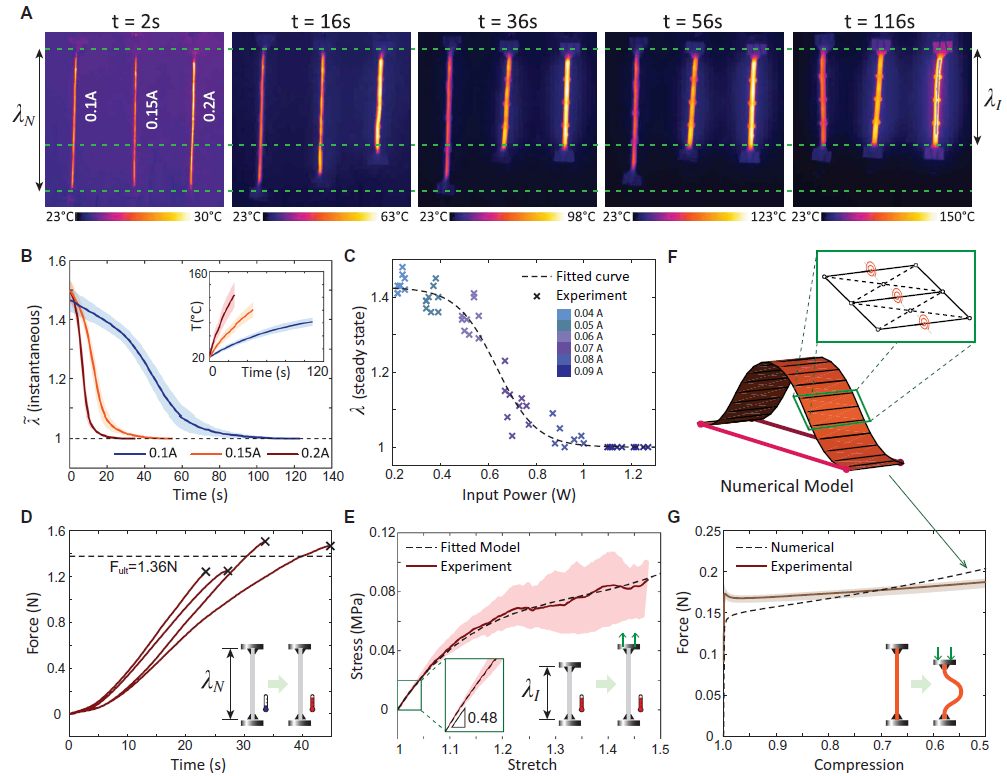
图2. 各单一构件的材料力学性质。
(A-E)LCE材料在电热驱动下的热-力学性质;(F-G)Kapton被动层的平面外屈曲变形。

图3. 一维复合三明治结构的曲率与上下LCE主动层收缩变形的关系。
这种曲面软体机器人利用液晶弹性体材料(LCE)的可重复变形性,实现了曲面几何的实时可控重构。同时,通过引入向平面外屈曲的被动层,增加了结构的有效刚度,解决了以往薄壳类驱动装置或软体机器人难以承受较大荷载的缺点。该项研究体现了软体机器人从有限变形模式向自由变形的发展方向。未来,通过使用更先进的智能材料、更致密的网格和更复杂的控制电路,该设计有望用于远程人机协作、三维显示及主动式可穿戴设备等应用场景。

图4. 自由变形、操控物件及承重的展示。
(曲面软体机器人自重为33g)
论文第一作者为加州理工学院博士后研究员刘珂博士,通讯作者为Chiara Daraio教授。
链接:https://robotics.sciencemag.org/content/6/53/eabf5116
下载:Robotic surfaces with reversible, spatiotemporal control for shape morphing and object manipulation
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 西工大张雅莉/顾军渭团队《Adv. Mater.》: 聚酰亚胺电磁屏蔽复合气凝胶 2026-05-03
- 华科大黄永安教授团队《Sci. Adv.》:仿生制造重要突破 - “界面激光剥离”精准复刻蜻蜓翅膀 2025-12-17
- 上海交大路庆华教授团队 AFM:后烘构建自锁互穿网络用于增强3D打印聚酰亚胺的机械和热性能 2025-10-18
