自然界中,陆地上的变色龙、色彩斑斓的蝴蝶,以及海洋中的章鱼、乌贼等头足类生物,均进化出了令人惊叹的变色能力来适应外界环境。它们的变色机制兼具多样性与精准性:色素色依赖色素细胞内黑色素、类胡萝卜素等物质的聚集与扩散,实现颜色深浅的快速调节;结构色则通过体表的微纳结构(如蝴蝶鳞片的光栅、头足类皮肤的胶原纤维)对可见光的散射、干涉作用,呈现出虹彩般的光泽;部分深海生物还能通过生物发光机制,利用荧光素与荧光素酶的化学反应产生特定波长的光。这些变色机制使生物能精准响应光照强度、温度变化、天敌逼近等环境刺激,在实现体表颜色快速切换的同时,同步调整肢体姿态与行为模式,进而高效完成伪装捕猎、警戒御敌、交流沟通及求偶展示等关键生存任务。受此启发,研究人员利用聚合物薄膜、弹性体以及凝胶等材料设计开发了多种具有变色能力的软驱动器和机器人。其中,高分子水凝胶因具有其类生命体组织的模量,固有的湿软特性、以及对外界刺激的可调响应能力,从而引发了人们的极大兴趣,成为该领域的重要优选材料之一。近年来,具有协同变色/变形能力的水凝胶驱动器/机器人在功能单元构筑、复杂3D驱动与智能变色协同以及刺激响应机制等方面取得诸多突破,其在伪装抓手,仿生爬行/游泳机器人和信息加密等领域展现出了巨大的应用前景和研究价值。
近期,中国科学院宁波材料所海洋关键材料全国重点实验室陈涛研究员和路伟研究员在Advanced Materials上发表题为“Bioinspired Color-Changing Polymeric Hydrogel Actuators/Robots”的综述文章,系统总结了仿生变色高分子水凝胶驱动器/机器人的最新进展,以仿生变色高分子水凝胶驱动器/机器人为对象(图1),详细介绍了色素色、结构色、荧光色三种变色水凝胶驱动器的构筑方法、变色机理、和变形-变色协同机制,并深入讨论了其在当前的应用价值和存在的问题,以及未来的机遇与挑战。期待本综述能够吸引跨学科的合作创新,为变色高分子水凝胶驱动器/机器人性能的提升和应用的扩展提供新思路。
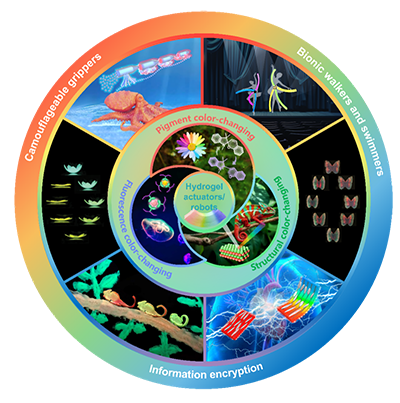
图1 受生物启发的色素色、结构色和荧光色变色高分子水凝胶驱动器/机器人及其应用
色素色是物质中具有特定化学结构的色素吸收可见光(400-700 nm)中特定波长的光,反射其余波长的光,从而被人眼感知而呈现的颜色。其本质是分子中电子跃迁能级与可见光能量的匹配(图2a),这一过程受分子结构(如共轭度、取代基、金属配位)或聚集态等因素的影响。通过施加外界刺激改变电子跃迁进是调控色素色的有效策略包括光诱导的顺-反异构、热诱导开环-闭合反应,质子化/去质子化诱导的共轭体系电子分布变化,电诱导的氧化还原反应。这些具有响应的色素通常可以通过物理掺杂的方式引入水凝胶驱动器中,在外界刺激下为水凝胶驱动器提供自然光下稳定的颜色变化。本章重点介绍了基于色素色的变色高分子水凝胶驱动器,详细阐述了有机色素和无机色素两种变色水凝胶驱动器的变色过程,变色机理和驱动行为。考虑到存在大量具有丰富变色特性的有机/无机染料,更先进的色素色变色柔性驱动器/机器人有望被开发出来,以探索它们在传感或生物成像等方面的重要应用。
结构色属于物理色,其颜色产生不依赖于物质自身的化学性质对光的吸收,而是源于物质内部周期性微纳结构与光之间的相互作用(如干涉、衍射、散射或反射)。常见的结构色材料为光子晶体,通常以蛋白石或反蛋白石结构通过包埋、物理沉积及界面复合等物理作用方式引入水凝胶基质中。由于光子晶体的颜色取决于光子带隙,且其受晶格间距、观测角度及介质折射率的影响。因此,对于结构色水凝胶驱动器而言改变晶格间距是实现颜色转变的一种直接和有效的方式。这种变色的最常见的机制是外界刺激诱导水凝胶网络发生收缩或舒张从而带动内部周期性结构晶格距离变化,以实现宏观颜色的调节(图2b)。本章探讨了构筑结构色变色水凝胶驱动器的策略以及它们变形-变色协同机制。结构色水凝胶的驱动器设计的巧妙之处在于形变和色变的内在耦合。通常可以在单一的外界刺激下诱导结构色水凝胶驱动器发生宏观形貌变化,导致内部规整排列的光子晶体晶格间距发生改变,从而改变了水凝胶驱动器的表观颜色。这种独特的自反馈机制,使得水凝胶驱动器无需外部辅助,仅通过肉眼可见的颜色变化,就可以直观地反应其自身的变形程度与实时状态。因此,这种与生俱来的协同性使其在可视化传感领域展现出独特优势。
荧光色通常是指物质吸收特定波长的光(多为紫外光)发射出波长更长、能量更低的可见光,从而呈现出的鲜艳色彩。这种颜色具有光致发光的特点,且色彩通常比普通颜色更明亮、饱和度更高,且在黑暗环境中经激发后可产生明亮鲜艳的光学信号,这一特性使其在光线不足的环境(尤其是海洋环境)中展现出潜在应用价值。。荧光材料可以分为多种类型包括有机荧光团、镧系配合物和发光纳米粒子等。它们可以通过物理掺杂或是化学接枝、共聚的方法引入水凝胶骨架中,赋予水凝胶驱动器荧光性能。当荧光水凝胶驱动器受到紫外光照射后,其内部荧光团中的电子会吸收能量从基团跃迁至激发态再通过辐射跃迁回到基态并伴随光子的发射(图2c)。 近年来,荧光色变色水凝胶驱动器在制备技术、刺激响应协同方式、功能扩展等方面取得了诸多突破性发展,本章重点介绍了基于荧光色的变色水凝胶驱动器。基于荧光材料多种多样的变色刺激方式和机制,使得水凝胶驱动的变色行为不仅可以不受变形驱动的干扰,实现正交响应变形变色,展示出高度的设计自由度和应用灵活性,而且可以在同一刺激下匹配形状的变化实现协同响应变形变色,从根本上避免了响应不同步的风险,使得协同行为更精准、更易于控制。

图2 高分子水凝胶驱动器/机器人的三种变色机理
该综述介绍了仿生变色高分子水凝胶驱动器/机器人在伪装抓手、仿生爬行/游泳机器人、信息加密等领域的应用探索。目前变色水凝胶驱动器的应用探索仍处于起步摸索阶段,相关应用多偏向概念化展示,距离真正落地实际环境、甚至实现产业化发展还有很长的路要走。首先,水凝胶驱动器变形和变色速度有待提高。其次,力学性能与耐用性不足是关键短板。再次,材料体系的环境耐受性需进一步优化。此外,现有体系功能较为单一,需重点推进多功能集成设计。因此,这一领域的进步和突破将需要跨学科的合作创新。本综述提出了该领域未来的发展方向,与计算机领域深度融合,与加工制造领域协同创新,与医学领域跨界融合,与光学/传感领域交叉创新,以及与机械领域集成创新等。
原文链接https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202519281
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 南林蔡旭敏、徐莉/河海余颖 AFM:聚集诱导生物基二聚体(香豆素)的力致/热致变色 2026-07-25
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 合工大胡颖、张晨初/赵玉顺 AFM:仿生“变色蝴蝶”驱动器实现形变、变色与红外发射率调控协同响应 2026-06-07
- 华南理工大学赵俊鹏教授 JACS:模块化合成氨基酸基界面功能高分子材料 - 粘与不粘,左右开弓 2026-07-29
