血管内介入治疗如取栓和药物递送需要高精度的柔性导管工具,但现有方法难以在复杂血管环境下实现快速、安全、有效的导航,容易导致介入失败或预后不良。因此,开发具有高级操控能力、柔软且微型化的导管成为研究热点(Sci. Robot.9,eadh0298,2024,Sci. Robot.4,eaax7329,2019.)。磁控技术为血管内介入微导管提供了非接触式、灵活操控的可能性,能够借助磁场实现多自由度控制和稳定控制,有助于提高介入手术的成功率和安全性。
近期,香港中文大学机械与自动化工程学系张立教授团队与香港理工大学杨立冬助理教授联合香港中文大学医学院内科及药物治疗学系脑神经科助理教授叶耀明医生、香港中文大学医学院内科及药物治疗学系利国伟脑神经学教授及脑神经科主任梁慧康教授开发了一款高灵活性、具有多种治疗功能集成的亚毫米级磁控微导管,用于主动导航到狭窄曲折的血管区域并提高疾病的治疗效率,从而推动血管内介入的高效性与微创化发展,为临床复杂血管疾病的治疗提供新方案。
2025年6月20日,相关研究成果以“A magnetically actuated microcatheter with soft rotatable tip for enhanced endovascular access and treatment efficiency”为题发表于国际著名期刊《Science Advances》。
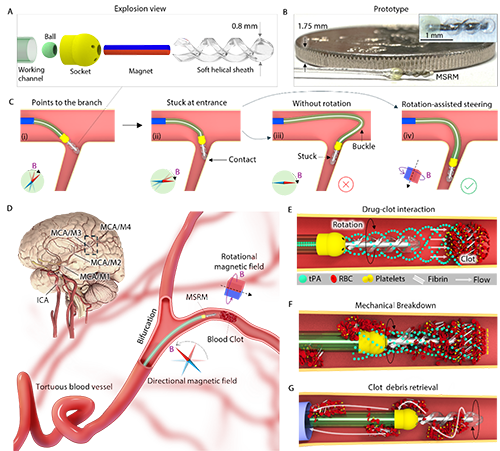
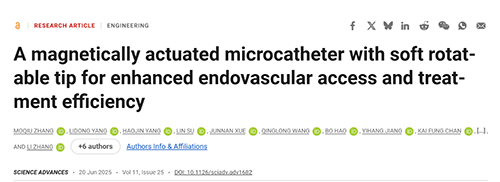
图1. 亚毫米级磁控微导管的设计原理和功能示意图
本文提出的亚毫米磁控软质机器人导管(MSRM)的高可达性和多功能整合得益于磁控可旋转头部的设计。如图1所示,MSRM集成了螺旋形弹性套筒和微型永磁体,直径仅800微米,尺寸接近神经血管导丝,能够主动导航进入细小血管。性能方面,微导管具备出色的旋转驱动能力,旋转磁场下尖端能有效产生推动和吸引流体的“泵送效应”,递送效率可达常规药物递送方法的10倍,显著提升导管的局部药物输送能力。此外,通过控制旋转方向,微导管可实现血栓机械破碎及碎片吸引回收,提升血栓清除的效果和安全性。导航性能上,旋转辅助使其能够顺利通过多个锐角血管分支,避免了传统静态磁场引导下导管的弯曲和卡顿问题,导航速度提高约50%以上。
旋转辅助主动转向策略能够显著提升微导管在复杂血管环境中的导航性能。通过施加旋转磁场,微导管能够有效释放尖端接触血管壁时产生的摩擦力,避免了传统方向磁场导航中常见的尖端卡顿、导管受力积累及弯曲压溃等问题。实验结果显示,该方法能将微导管的可达工作空间扩大最多50%,极大地提升了穿越狭窄分支和急转弯的能力。此外,在1:1人脑血管模型中,旋转辅助转向策略能够提高转弯效率2倍以上。与传统的手动旋转导管或者静态磁场驱动相比,旋转辅助导航所需的插入力显著降低,减少了血管壁损伤风险。长距离导航实验进一步验证了该策略能维持微导管在远端血管区域的可操控性和旋转能力,实现了近300毫米的连续复杂血管路径的导航。综上,旋转辅助主动转向不仅提升了微导管的导航效率和可达范围,还有效降低了操作难度和风险,为临床微创介入治疗中的精准导引提供了强有力的技术支持

图2. 主动转向策略的原理与实验验证
MSRM在医疗功能设计方面具备多重创新,旨在提升血管介入治疗的效率与安全性。通过结合旋转机械作用与局部药物释放,实现高效的血栓治疗效果。体外实验显示,结合溶栓药物和机械作用的治疗速度比单纯使用溶栓药物快约三倍,显著提升治疗效率。此外,机械摩擦速率对血栓清除效果具有明确促进作用且对不同硬度,不同长度的血栓的清除效率均表现出良显著提升。此外,该方法能够有效降低溶栓药物剂量,显著降低传统溶栓治疗的出血风险。治疗过程通过结合机械及药物手段,不仅提高了药物在局部的浓度和作用效率,还加快了清除速度,表现出优于传统导管定向溶栓和系统性用药的优异性能。
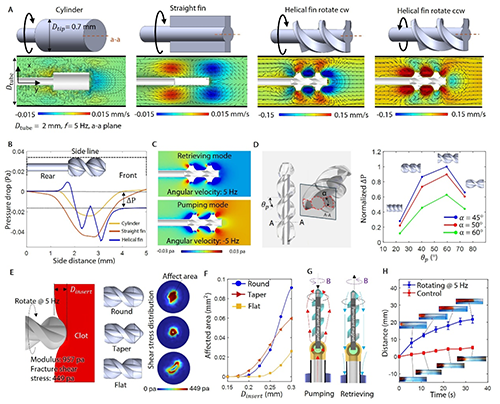
图3. MSRM 螺旋形头部流体与治疗功能设计与仿真结果。
MSRM的可达性增强和血栓处理效果在活体动物试验中的到了验证。实验中,微导管成功穿梭于兔股动脉至肾动脉的复杂血管路径,实现精确定位目标区域。旋转辅助导航使插入过程更顺畅,减少导管体张力和操作时间,避免了传统静态磁场下的导管弯曲和堵塞现象。在血栓清除过程中,微导管配合局部低剂量溶栓剂,利用5 Hz旋转磁场作用15分钟内实现血栓完全溶解,血管腔道恢复通畅。术后影像确认血栓已消失,无明显血管狭窄或残留血栓碎片。流体注入测试亦验证血管管腔恢复。整体治疗过程显示出高效、快速、无创的血栓清除效果,相较传统方法显著缩短治疗时间,降低并发症风险。此外,导管导航和治疗的重复性良好,显示出稳定性和临床转化潜力。

图4. 活体动物实验的设计示意图和验证结果
总结而言,本文提出了一种具备软质可旋转末端的磁控微导管,旨在提升血管内介入的可达性和治疗效率。该微导管通过旋转辅助自主转向,显著改善了在狭窄弯曲血管中的导航能力。实验证明其在体外脑血管模型和活体动物中表现出优异的操控性和导航能力,有望推动磁控微型医疗机器人的发展与临床应用。
这项研究得到香港研究资助局(RGC)、香港创新科技署(ITC)、中大天石机器人研究所、中大-中国科学院深圳先进技术研究院机器人与智能系统联合实验室、创新香港研发平台(InnoHK)的医疗机器人创新技术中心(MRC)的支持。该工作得到新加坡南洋理工大学沈祖尧教授、中国科学技术大学王柳教授的大力合作和帮助。
香港中文大学机械与自动化系博士后张沫艽博士为论文第一作者,香港理工大学杨立冬助理教授,香港中文大学医学院内科及药物治疗学系脑神经科助理教授叶耀明医生、香港中文大学医学院内科及药物治疗学系利国伟脑神经学教授及脑神经科主任梁慧康教授和香港中文大学机械与自动化系张立教授为论文共同通讯作者。
原文链接:https://www.science.org/doi/10.1126/sciadv.adv1682
近五年来,张立教授课题组深耕于磁驱动集群机器人、软体机器人等领域,实现了从毫米、微米到纳米机器人及其集群行为的研究与应用,并在著名期刊上发表了多篇学术论文。部分研究成果如下:
[1] Sci. Adv.11,eadt8213(2025).: 液态体抗生物膜机器人,具有可切换的粘弹性响应,用于复杂表面拓扑结构上的生物膜清除
https://www.science.org/doi/10.1126/sciadv.adt8213
[2] Nat. Commun. 15, 5197 (2024).: 聚焦超声实现了无牵引软体机器人的选择性驱动和牛顿级力输出.
https://www.nature.com/articles/s41467-024-49148-6#citeas
[3] Sci. Robot.9,eadh1978(2024): 基于激光散斑对比成像的微群体追踪与导航用于定向递送
https://www.science.org/doi/10.1126/scirobotics.adh1978
[4] Sci. Adv.10,eadk8970(2024).tPA: 修饰的微机器人集群可快速清除血栓,用于中风治疗,
https://www.science.org/doi/10.1126/sciadv.adk8970;
[5] Sci. Adv.9,eadf9278(2023): 磁性水凝胶集群可实现快速自愈合,用于按需栓塞治疗动脉瘤.
https://www.science.org/doi/abs/10.1126/sciadv.adf9278;
[6] Sci. Adv.9,eadj0883(2023).: 模块化磁性微机器人可实现可控拆分与组装,用于在胆管中靶向细胞治疗.
https://www.science.org/doi/abs/10.1126/sciadv.adj0883;
[7] Nat Mach Intell4, 480–493 (2022): 基于深度学习算法,磁性微集群可在复杂环境中实现实时分布规划与自主导航.
https://doi.org/10.1038/s42256-022-00482-8;
[8]Sci. Adv.8,eabq8573(2022): 磁性螺旋微机器人在内窥镜辅助下可实现快速精准递送,用于根除鼓膜造口管中的菌膜.
https://www.science.org/doi/abs/10.1126/sciadv.abq8573;
[9]Sci. Adv.8,eabn8932(2022): 具有可编程磁化和集成多功能模块的微型软体机器人可用于在胃肠道中靶向药物递送
https://www.science.org/doi/abs/10.1126/sciadv.abn8932;
[10]Sci. Robot.6,eabd2813(2021).: 干细胞微球机器人在内窥镜辅助下可实现快速长距离递送,用于远端狭窄腔体内靶向细胞治疗
https://www.science.org/doi/10.1126/scirobotics.abd2813;
香港中文大学张立教授团队主页:http://microbot.mae.cuhk.edu.hk/
- 宾夕法尼亚大学杨澍团队 Adv. Mater.: 研发多模式力致变色液晶弹性体微管 2025-06-16
- 武汉理工戴红莲、涂溶/华山医院陈天午 AFM:韧带修复者的福音 - 一种人工韧带制备的新方法 2024-10-14
- 华科大李亮教授、曹全梁教授团队 Nat. Commun.:微型磁控胶囊机器人实现多模态响应与多功能集成 2024-03-12
- 浙大赵朋/张承谦课题组 Addit. Manuf.:磁场辅助增材制造柔性驱动器 2024-02-06
