魔鬼鱼利用翼状胸鳍进行独特的振荡游泳,为设计潜在的快速、高效且机动性强的软体游泳机器人提供了宝贵的灵感。然而,至今这种能力尚未在软体游泳器中完全实现。在一个单一的软体游泳器中同时具备高速、高效率和高机动性,同时保持简单的驱动和控制,依然是一个巨大的挑战。
近日,北卡州立大学(NCSU)尹杰教授团队联合弗吉尼亚大学(UVA)董海波教授、Daniel Quinn教授团队,巧妙利用单稳态结构设计了一款利用自发快速弹跳实现快速且灵活游动的仿魔鬼鱼的机器鱼,创造了目前为止最快的游动速度(6.8身长每秒,相当于156.4 mm/s),同时具备高机动性,可实现贴近水面和水下游动。
该工作以”Spontaneous snapping-induced jet flows for fast, maneuverable surface and underwater soft flapping swimmer”为题近日发表于”Science Advances” 杂志上,并且文章同时被Science杂志和Science Advances首页亮点报道。团队博士生清海涛领衔第一作者,其他共同作者包括博士生郭佳诚(UVA),朱远航博士(UVA,现任加州大学河滨分校助理教授),赤银鼎博士(NCSU),洪尧烨博士(NCSU),董海波教授和Daniel Quinn教授,论文唯一通讯作者为尹杰教授。
研究人员最初的目标是设计一种同时具备高速、高能效和高机动性的软体水下机器人。正如常见的研究路径,他们从大自然中寻找灵感。尽管人们可能会首先想到以旗鱼或其他以速度闻名的鱼类为模型,但研究人员却被魔鬼鱼及其独特的“翼状胸鳍”深深吸引。这款软体机器鱼拥有与魔鬼鱼类似形状的鳍,鳍的材料在展开时保持稳定。鳍连接在一个柔性的硅胶主体上,主体内含一个可充气的腔体。通过向腔体充气,可以迫使鳍向下弯曲——类似于魔鬼鱼拍动鳍的下拍动作。当腔体中的空气排出时,鳍会由于内在弹性恢复力的驱使,自发地快速回弹到初始位置,不需要额外的能量输入(图1)。相比于团队之前研发的双稳态蝶泳软体机器人,这款机器鱼不仅简化了驱动过程,而且节省输入能量的同时实现了比之前更快的速度和更好的机动性。同时,该机器鱼的结构设计和性能表现得到了几位审稿人的一致好评。图1E展示了通过简单调节单输入驱动频率 f实现单稳态软体游泳机器人在非结构化水下环境(如简单的垂直障碍物通道)中的导航能力。障碍通道由两个上部和一个下部平板障碍物组成。降低驱动频率 f使机器人下潜,而增加 f 则使其以可调攻角上升,表现出“W”形游泳轨迹,从而成功通过障碍物通道。
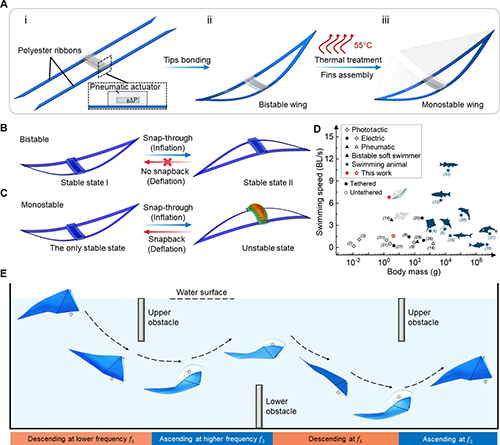
图1 仿魔鬼鱼的机器鱼的设计
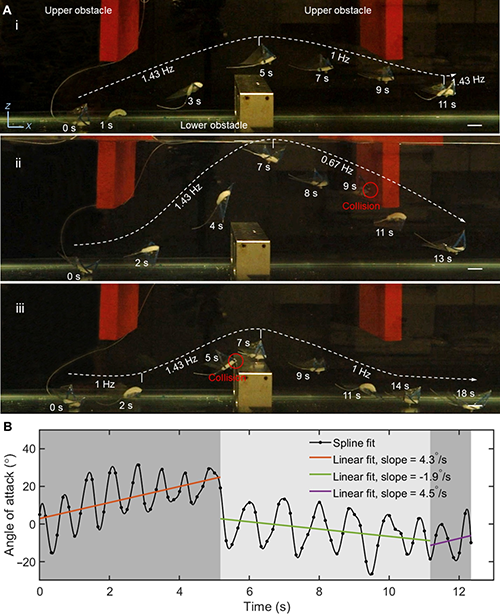
图3 具有高碰撞恢复力的简单水下垂直障碍巡航
具备多模式的水面和水下游泳能力,并能在不同深度进行游动,这款软体游泳机器鱼通过简单调节单输入驱动频率,能够在更加复杂且非结构化的水下环境中穿越障碍,实现潜在的高效巡航。图3显示通过调节驱动频率,软体游泳机器鱼在由顶部两个泡沫板(作为上方障碍物)和底部一个金属板(作为下方障碍物)组成的水下障碍中的巡航表现,包括无碰撞 (i) 和发生碰撞 (ii) 的情况。虚线表示其游泳轨迹。在 (ii) 和 (iii) 中,软体游泳机器人在下潜和上升过程中分别与上方和下方障碍物发生碰撞。3B显示了在其导航过程 [(A), i] 中,对应的攻角随时间的变化情况。软体游泳机器鱼的上升和下降机动通过平衡三个垂直力来实现:重力、浮力和升力。机动过程中重力保持不变。当气动腔充气导致翼片翻转时,浮力增加。在翻转运动过程中,升力也会增加,因为向下偏转的翻转喷射比向上偏转的回弹喷射更强。这种喷射强度的差异可能导致正的频率相关升力。因此,通过调节驱动频率可以实现受控的垂直机动。
原文链接:https://www.science.org/doi/10.1126/sciadv.adq4222
- 麦吉尔大学李剑宇教授团队 Nature: 工程化强韧血凝块实现快速止血与组织再生 2026-04-30
- 宁波材料所陈涛研究员/阎敬灵研究员 ACS Nano:利用定向离子传输编程均相水凝胶 - 实现快速三维形态重构 2026-04-17
- 中南林科大卿彦/吴献章、宁波材料所陈涛/肖鹏《Nat. Commun.》: 非对称亲疏水异质结构驱动快速水扩散 - 杂化水凝胶实现高效大气水收集 2026-04-02
- 中科院纳米能源所李琳琳团队 Adv. Mater.:操作灵活且抗疲劳的舌-机接口 2026-02-12
- 宁波材料所刘小青研究员团队 Mater. Horiz.:高温触发交联策略助力有机相变复合材料自阻燃 2024-08-28
- 哈工大冷劲松院士团队《Adv. Funct. Mater.》:一种具有灵活功能导向特性的组装力学超材料 2024-03-30
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
