软体机器人在环境探测、信息采集、紧急救援、智能装备、人-机-环境交互等领域有广泛应用需求。目前大多数软体机器人运动模式单一,无法实现多环境适应性运动与环境自主感知。光热响应软体机器人具有刺激源丰富、响应快速和高环境适应性等优势。现有的光热致动器大多通过在柔性基质中整合各类光热填料实现,其微观结构、力学性能和局部响应可调控性较差,限制了结构/性能可编程软体机器人的开发。当前,微结构主导光热致动的智能响应材料研究较少,主要挑战在于难以精确协同材料的机械变形性和光热响应性。多孔材料(例如气凝胶)通常具有较高比表面积,能够提供蜿蜒曲折的透光路径,减少光学散射/反射损失,从而提高光热转换效率,但这类块体多孔材料的高厚度限制了其致动性能。相比之下,微纤维膜(MFF)具有微观结构和机械性能易调控性,为实现以微观结构主导的可编程光热致动器提供了理想素材。
传统MFF机械强度较差,难以实现高效致动性。当前,尚缺乏一种策略,能够兼顾光热致动器在微结构、材料与功能方面的灵活性与可编程性,以同步实现结构光热效应、机械可变形性、致动可设计性与环境感知功能。MFF在结构和力学性能方面具备高设计性,有望克服领域挑战,开发以结构光热效应为主导、具备优异机械性能的高性能光热致动器,并赋予其同步的电学感知能力。例如电磁辐射(EMR)(一种广泛存在于环境中的污染/危害源)的多场景动态检测,对提升生产/生活环境安全性有重要意义。目前,尚未有环境EMR感知型光热致动器及多环境自适应运动软体机器人的报道。
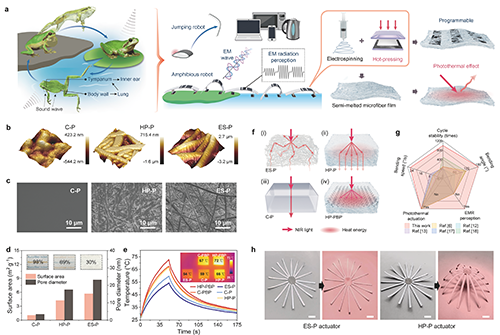
图1. EMR感知型光热增强MFF致动器
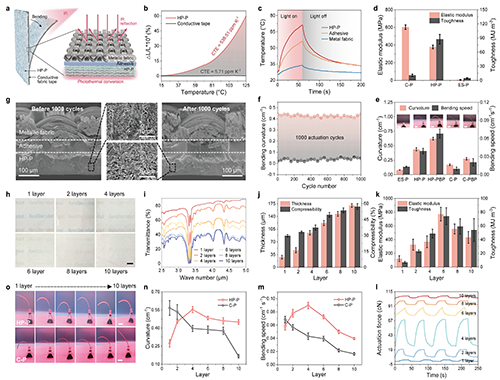
图2. 机械-光热协同增强的HP-P致动器
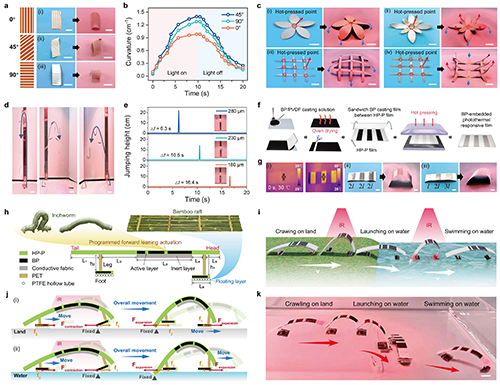
图3. 热压可编程光热致动器和机器人
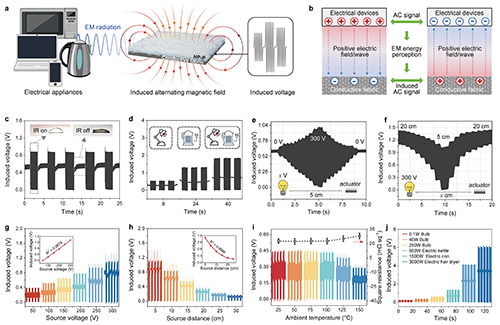
图4. EMR感知型陆地机器人
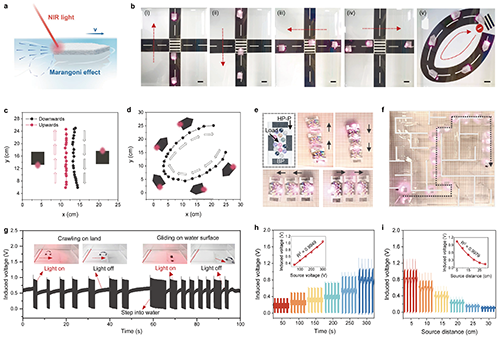
图5. EMR感知型水生和两栖机器人
利用HP-P薄膜的疏水性和光热效应,可在水上产生Marangoni推进力,实现光热操控的多方向和曲线运动。通过在HP-P致动器边缘部署BP光热增强图案,可提升光热Marangoni推进力,实现了物体装载、运输及水上迷宫穿越。受此启发开发了水陆两栖机器人,通过足部BP图案增强光热效应,结合仿生“竹筏”中空阵列结构,提高了浮力和方向稳定性,实现了水上可控运动。该两栖机器人无论在水面还是陆地均能稳定感知EMR,显示出高灵敏动态EMR检测能力(图5)。
论文信息:M Wu, X Zhou, J Zhang, L Liu, S Wang, L Zhu, Z Ming, Y Zhang, Y Xia, W Li, Z Zhou, M Fan, J Xiong*, Microfiber Actuators With Hot-Pressing-Programmable Mechano-Photothermal Responses for Electromagnetic Perception, Advanced Materials, 2024, 10.1002/adma.202409606.
全文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202409606
课题组主页:https://www.x-mol.com/groups/xiong_jiaqing
- 华南农大杨卓鸿、阿尔伯塔大学曾宏波 AFM:单宁酸改性纤维素纳米纤维增强型可聚合共晶凝胶 - 用于高性能可拉伸应变传感器 2026-07-30
- 东华大学王刚、孙恒达/中科院福建物构所林悦《Adv. Mater.》:液态金属也能绝缘?高性能热界面材料新策略 2026-07-15
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 苏州大学汪晓巧教授、张克勤教授团队 ACS Nano:兼具辐射制冷与空气过滤双功能的螺旋纳米纤维膜 2026-04-30
- 苏大汪晓巧教授、西工大杨海涛教授 AFM:高韧性可拉伸丝蛋白纤维膜 - 赋能新一代透气耐用表皮生物电子 2026-04-28
- 哈工大潘昀路教授团队 AFM:从“破乳”入手的肾小球仿生纳米纤维膜 - 实现微纳乳液高通量分离 2026-02-25
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
