无人飞行器(UAV)具有高性价比、超视距观测、操控简便等特点,可替代人类执行各类挑战性任务,在跟踪/监视、物体输运和紧急救援等方面具有重要的应用潜力;尤其是具备寄居功能的无人机可以附着在目标表面,有助于突破无人机功耗高、续航短的瓶颈,实现有限机载能源下的长时间持续作业。然而,目前寄居无人机主要附着在静态或准静态目标表面,难以应用于移动目标物体,极大限制了无人机作业的作业范围。如果无人机能够寄居在动态目标表面,利用移动目标完成无人机自身任务,将极大拓展无人机的任务执行场景,是无人机研究的创新思路。
电致动智能粘附结构及其仿生机制

图1 一种基于电致动智能粘附结构的寄居机器人
液晶弹性体人工肌肉力学性能
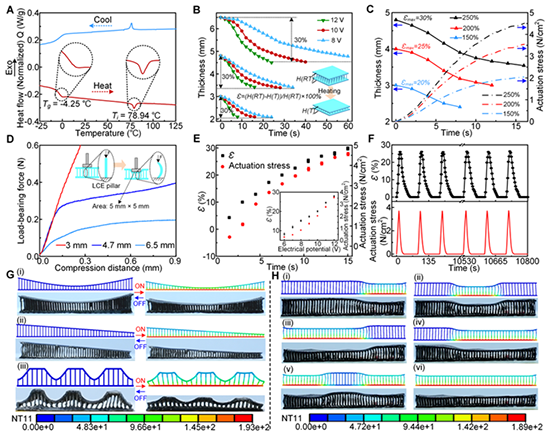
图2 三明治状人工肌肉的致动与变形特性
电致动智能粘附结构的粘/脱转化行为自主感知

图3 电致动智能粘附结构的粘/脱转化自主感知
当无人机在目标目标表面降落着陆时,通常会产生界面对接冲击力,极大影响无人机的寄居效果。在此,研究团队提出的电致动智能粘附结构中的离散化人工肌肉和微尺度粘附结构,可以有效地吸收界面对接冲击能,从而抑制结构振动和回弹,保障无人机的寄居动作稳定性。同时,由于离散化人工肌肉阵列有效降低了智能粘附结构的整体刚度,增加了系统柔韧性,电致动智能粘附结构对弓形面、波纹面等非平整表面仍表现出良好的接触适应性,亦对不同材质、不同粗糙度目标表面表现出优异的粘附性能,极大拓展了无人机的寄居表面类型。

图4 电致动智能粘附结构的能量吸收和接触适应性
电致动智能粘附结构在寄居无人机中的集成应用
研究团队利用3D打印的装配支架将电致动智能粘附结构置放于无人机底部或顶部。若电致动智能粘附结构安装在无人机底部,其能够稳定在附着在移动的车顶(在车辆急加速、急减速、急转弯、颠簸路段均表现处优异的附着特性),并可实时感知反馈着陆-寄居-复飞动作;若智能粘附结构安装在无人机顶部,其既能在倾斜目标的下表面寄居,亦可在天花板的负平面稳定附着,同时利用柔性传感器实时感知无人机寄居状态;为无人机的自适应稳定寄居提供了创新途径。

图5 寄居无人机应用展示
研究团队提出的基于电致动智能粘附结构的寄居无人机,利用仿生粘附结构替代传统负压吸附、电磁吸附等界面附着方式,有助于减轻无人机负载重量;利用人工肌肉灵活、可控的变形能力,取代传统的刚性结构和电机,有助于简化驱动控制系统;利用集成设计的自感知功能,有助于在不影响寄居功能前提下实现无人机的自主控制;是粘附/传感/致动一体化结构在无人机寄居领域的新尝试。更为重要的是,电致动智能粘附结构可与大多数商用无人机直接集成,若将其安装于水下航行器,能够进一步丰富寄居机器人类型。
原文链接:https://www.science.org/doi/10.1126/sciadv.adj3133
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 浙江农林大学傅深渊教授团队《Chem. Eng. J.》:基于模量图案化策略实现介电弹性体驱动器的定向驱动变形 2022-06-27
- 福州大学黄剑莹教授 AFM:汗液自适应智能粘附水凝胶 - 赋能舒适穿戴传感器新突破 2026-01-27
- 东北农大张海洋团队 Small:受章鱼启发的刚度可调的智能粘附剂 - 用于空气及水下不平整表面的粘附 2025-09-02
- 西安交大邵金友、田洪淼团队《Sci. Adv.》:开发出传感触发变刚度智能粘附结构 2023-03-25
