西安交大邵金友、田洪淼团队《Sci. Adv.》:开发出传感触发变刚度智能粘附结构
壁虎能够在竖直墙壁以及天花板表面灵活自由的爬行或长时间静止不动,对于接触表面表现出强大且可逆的粘附能力。以其脚掌末端结构为研究对象,科研人员已经能仿制出类似的干粘附结构,并在特种机器人、智能机械手、医疗工程等领域展现出不可替代的应用潜力。尽管近二十年来干粘附仿生结构取得了诸多研究进展,但人造结构与生物活体组织在表面适应性和粘脱快速切换方面仍存在显著差距。开发具有优异表面适应性及其快速粘脱切换能力的干粘附结构是其工程应用的挑战性难题。
从“单一功能”到“系统集成”
近日,西安交通大学邵金友、田洪淼团队提出了一种基于传感触发的变刚度智能粘附结构,不同于传统研究仅关注结构形态的仿生策略,该研究结合了生物体肌肉组织和传感神经的耦合功能,即基于界面接触状态的实时感知,通过磁流变效应实现对粘附结构刚度的主动调控,达到非平整表面自适应附着及其粘附/脱附快速切换的目的。当粘附结构接近目标表面时,结构刚度调整为软状态(移除磁场),以实现目标表面的共形接触;在拾取目标物体时切换到硬状态(施加磁场),以实现目标表面的高强度附着;在释放物体时再次恢复到软状态(移除磁场),以实现脱附行为,如图1所示。智能粘附结构的自适应变形和形状锁定能力,使其能够在甚少考虑表面形态或纹理的情况下对各类表面进行操作,已成功实水杯、高尔夫球、西红柿等日常生活常见非平整表面物体的拾取与释放。此外,归结于磁场的快速切换特性,智能粘附结构的响应时间可达毫秒级别(约100 ms),类比于哺乳动物骨骼肌的响应特性,突破了粘附结构在高节拍操作应用中的技术瓶颈。相关研究成果以“Sensing-triggered stiffness-tunable smart adhesives”为题发表《Science Advances》上,西安交通大学王铎睿博士为论文第一作者。
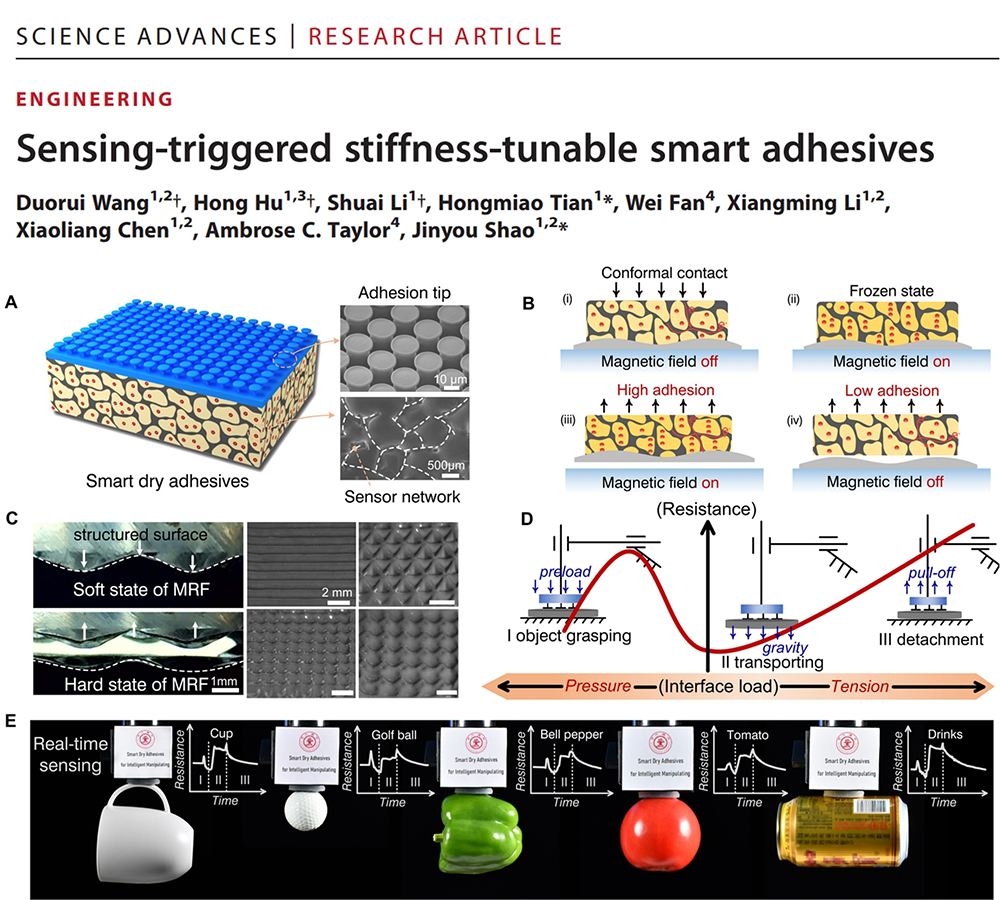
图1 基于磁流变效应的传感触发变刚度粘附结构设计思路
刚度调控下的非平整表面粘附增强机制
智能粘附结构通过实时刚度调控,实现接触过程软状态和脱离过程硬状态的控制,达到目标表面的保形接触和形状锁定。相比传统单一刚度粘附结构,变刚度智能粘附结构对于曲面乃至非平整表面的粘附性能提升一个数量级,如图2所示。有趣的是,智能粘附结构由于在脱离过程中切换到硬状态,导致在整个拉拔过程中保持稳定的“U”形接触。不同于传统硬质粘附结构的点接触以及软质粘附结构的“N”形接触,这种恒定的“U”形接触提供了相对较大的接触面积、较小的剥离角以及切向摩擦作用,有利于提高粘附性能。此外,研究团队建立了基于cohesive单元的力学模型,探究了刚度调控下仿生结构在非平整表面的粘附增强机制,如图3所示。在接触和拉拔过程中,智能粘附结构更为匀化的界面应力分布是其粘附增强的关键;同时,智能粘附结构界面在拉拔过程中所受到的法向应力和剪切应力均处于较低水平,对界面剥离会产生有效的抑制作用。
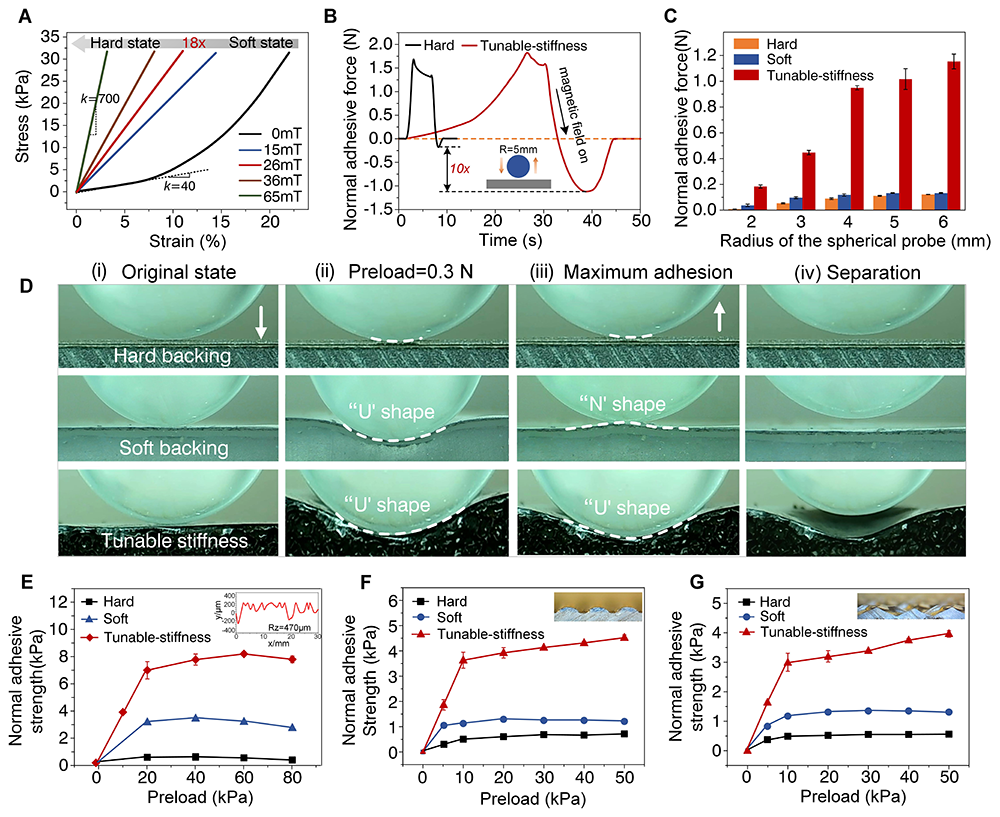
图2 智能粘附结构的粘附特性

图3 智能粘附结构的粘附增强机制
传感触发工作机理
在粘附过程中,界面接触状态的实时监测对于刚度调控尤为重要,其决定了粘附结构何时变硬、何时变软,达到稳定高效抓取的目的。受蜘蛛感知系统的启发(基于纳米裂纹结构的断开-重连效应),研究团队提出了一种基于碳纳米管的聚氨酯网络-磁流变材料的复合形式力学传感器,用于接触界面力学信号的监测,如图4所示。在外力作用下,复合结构中的碳纳米管涂层会产生裂纹,从而影响电阻的变化。更重要的是,涂层中裂纹的数量和密度可以通过对复合结构施加不同的预拉伸来实现调控,以此完成传感器灵敏度的优化制造。该传感器在面向不同轮廓目标(平面或曲面)和不同载荷形式(压缩载荷或拉伸载荷)时,均表现出良好的灵敏度和线性度,满足了智能粘附结构在拾取复杂形状物体时的界面感知要求,提供了一种仅通过记录电阻变化来监测粘附过程的创新途径。
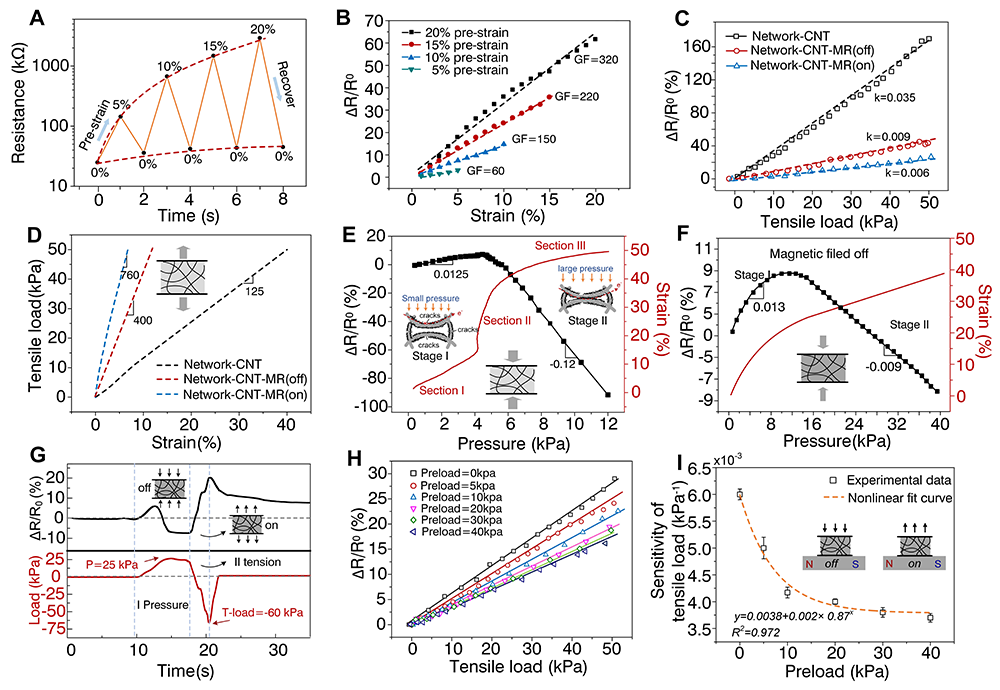
图4 智能粘附结构的传感性能
智能粘附操纵展示
智能粘附结构能够通过刚度调控产生具有显著差异的高/低附着力。为此,研究团队将一体化智能粘附结构集成到机械臂末端,成功实现了对非平整表面物体的抓取、转移和释放操作,如图5所示。在操作过程中,无论是接触阶段、转运阶段还是释放阶段都可以观察到具有显著特征的电阻信号。更重要的是,由于磁流变脂对外部磁场的快速响应能力,智能粘附结构的粘附切换时间低至100 ms,达到了哺乳动物骨骼肌的收缩/扩张水平,远远高于传统基于光控、热控等粘附切换方法的响应时间,满足了机器人快节奏应用场景的需求。此外,基于磁场调控的粘附切换策略具有更为简单的结构配置,相比气动控制方法不再需要额外的流体通道设计以满足取放系统的压力供给需求。
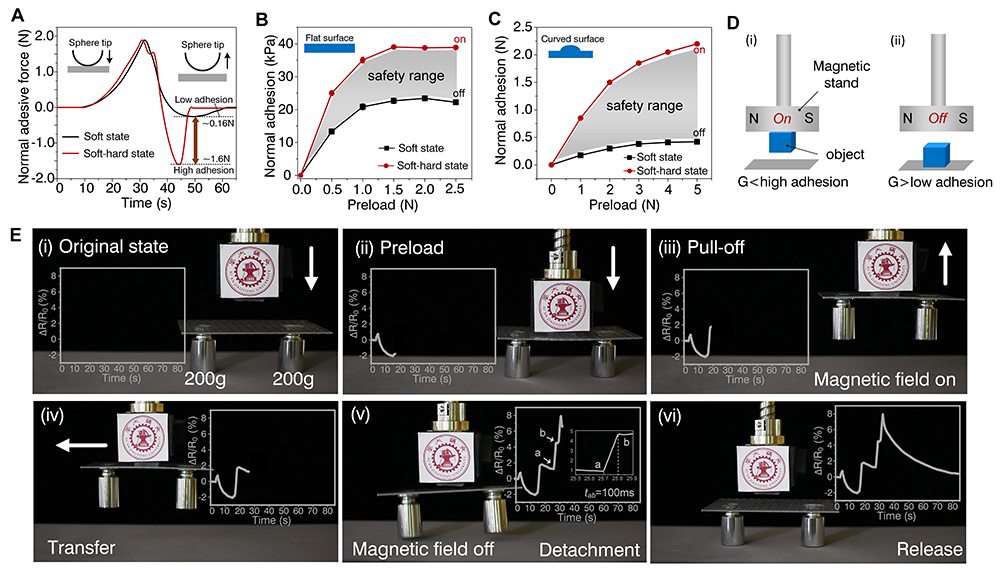
图5变刚度智能粘附结构的物体操纵展示
小结
邵金友、田洪淼团队长期致力于微纳结构界面仿生粘附相关研究,已经在界面粘附机制、仿生粘附结构制备、智能机器人开发等领域做出诸多创新性工作。与传统被动式粘附结构不同,本研究提出的新一代干粘附结构,具有典型的智能化主动式粘附特征,更接近于真实的自然界生物体,具有优异的目标表面适应性以及粘附/脱附快速转化性。更重要的是,肌肉组织和传感神经的耦合仿生功能结构不局限于匹配壁虎仿生干粘附结构,可拓展至章鱼、树蛙等湿粘附结构,为仿生粘附领域提供一种通用策略,有助于推动夹持、操纵和攀爬等系列化智能机器人的发展。
原文链接:https://www.science.org/doi/10.1126/sciadv.adf4051
