软驱动器和微型机器人因其在交通运输、光电转换设备、临床护理和其他领域的潜在应用而备受关注。但相对复杂的制造工艺、高昂的价格、复杂的结构、较差的便携性、较低的灵敏度和较长的响应时间,这些都很大程度上限制了它们的实际应用。如何利用简单的制备方法获得多功能、低成本、高灵敏度和稳定性良好的软机器人仍然存在挑战。
近日,暨南大学刘明贤教授团队提出以中国墨水(C)、聚乙烯醇(PVA)和聚乙烯(PE)为原料,采用简单涂覆的方法制造了结构稳定的PVA/C/PE双层膜的光驱动柔性致动器和多功能传感器。该工作发表于Science China Materials (中科院分区:二区,影响因子:8.10),题目为”Light-driven Locomotive Soft Actuator and Multi-functional Sensors Based on Asymmetric PVA/Carbon/PE Bilayer Film”。论文第一作者为2021级硕士生吴凤,刘明贤教授为论文唯一通讯作者。
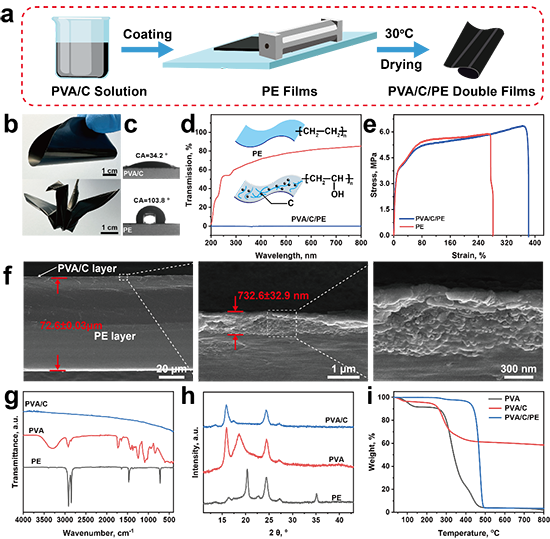
图1. PVA/C/PE双层膜的制备与表征。
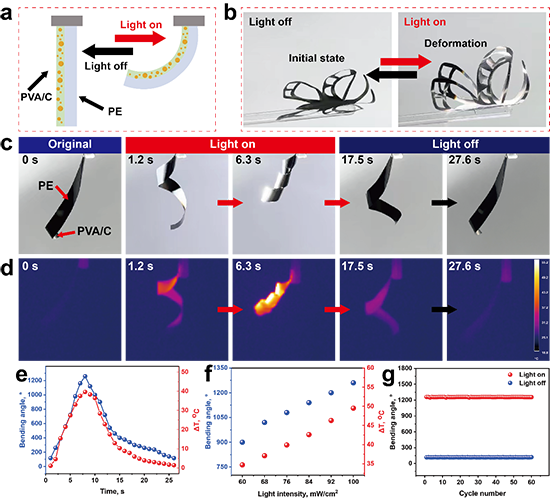
图2. PVA/C/PE双层膜传感器的氙灯驱动致动。
基于PVA/C/PE双层膜优异的光驱动变形性能,其有望成为构建光驱动致动器的元件。如图2a所示,致动器由PVA/C和PE层组成。众所周知,PE是商业上广泛使用的高分子材料,具有大的热膨胀系数(约500×10-6 ℃-1) [47],远高于墨水(106×10-6 ℃-1) [36]和PVA (31.17×10-7 ℃-1) [48],而两层之间的受热变形失配会产生大的弯曲变形。在氙灯照射下,PVA/C层吸收光并将其转化为热能后传导到PE膜层,PE层受热而引起体积膨胀。如图2b所示,当用氙灯(60 mW cm-2)照射蝴蝶形状的PVA/C/PE驱动器时,原本张开的蝴蝶翅膀发生收卷。他们以氙灯为能量源,进一步定量研究PVA/C/PE双层薄膜的光驱动性。如图2c所示,在氙灯照射(100 mW cm-2)下,致动器在1.2 s内弯曲成螺旋状,连续照射6.3 s后弯曲角度可达到近1260°。关闭氙灯后,驱动器在21 s内恢复到初始形状,表现出良好的可逆性(具体过程见视频S1)。图2 d则为氙灯驱动形变与回复过程对应的热红外图像。
视频S1. 氙灯驱动下的变形与回复

图S3. 氙灯驱动的PVA/C/PE致动器模拟尺蠖运动。
尺蠖是自然中常见的软体动物,具有利用背部肌肉的伸展和收缩来实现定向爬行的独特运方式(图3a)。尺蠖的爬行过程可以简单分为两种方式:尾巴固定,身体伸展带动头部前进;或者头部固定,身体拱起带动尾部向前运动。尺蠖通过伸展和弯曲间的交替运动实现定向爬行。以氙灯作光源,结合尺蠖的仿生结构设计。他们设计了一种类尺蠖的具有双层结构的PVA/C/PE柔性仿生机器人,它可以实现氙灯驱动下的定向移动。
图3b展示了尺蠖状软体机器人的光响应爬行示意图,该机器人具有锯齿状头部和规则形状的尾部。当受氙灯照射时,其身体发生卷曲;而未受氙灯照射时,机器人身体逐渐恢复其初始形状。但由于矩形的尾巴(F1 )比锯齿状的头部受到更多的摩擦(F2 ),在形变恢复过程中受到的阻力会更大,因此在形变恢复过程中呈现身体带动头部向前运动的动作。因此,在氙灯的循环照射下软体机器人(21 mm长,7 mm 宽)能够实现在不同的基底上的运动。图3 c为机器人模拟尺蠖在叶片上的爬行。该尺蠖机器人在411.7 s内在叶片上爬行了40 mm, 具体过程见视频 S2所示。

视频S2. 氙灯驱动模拟尺蠖在叶片上运动。
除了可以实现在树叶上的爬行,该机器人还可以实现在纸张和棘轮形基板上的定向运动,具体过程见视频 S3和S4所示。

视频S3. 氙灯驱动模拟尺蠖在纸张上运动。
视频S4. 氙灯驱动模拟尺蠖在棘轮形基板上运动。
图3d为氙灯刺激时机器人头部和尾部爬行距离随时间的变化,揭示了机器人受氙灯驱动的详细过程。图3e为机器人爬行过程中长度的变化。当氙灯打开时,机器人蜷缩起来,头部和尾部之间的距离急剧减小。氙灯关闭,尾部固定,身体带动头部向前,头部和尾巴的距离逐渐增大。氙灯强度的波动与机器人长度变化的一致性进一步说明了机器人的定向运动的光热驱动机制。

图4. 红外刺激下仿生机器人实现方向可控的连续运动。
在红外刺激下,软体机器人能够在棘轮形基底上进行多种类型的运动,例如爬行、推箱子和搬运货物,示意图见图4b所示。图4c展示了808 nm红外光波动驱动的尺蠖状软机器人(9.2 mg)的定向运动的图像。在808 nm红外光连续刺激228 s后,它自发向右爬行了约38 mm。除了爬行外,机器人还能推运物体,如图4d所示。除此之外,机器人还可以实现对物体(3.4 mg)的搬运(图4e),搬运物体的具体过程见视频S5。

视频S5. 机器人红外驱动下实现对物体的搬运。

图5. PVA/C/PE双层膜传感器的光热性能。
继而研究了温度对薄膜电阻的影响。如图5d所示,薄膜电阻随着温度升高而增加(30℃-90℃)。相关工作表明,导电网络或通道断裂会增加材料的电阻[49]。当复合材料受热时,由于导电相与基体的膨胀程度不同,复合材料的内部结构发生变化,导致“导电通道”的断裂,从而引起电阻的增大。图5e显示了薄膜在氙灯(100 mW cm-2)照射循环下的电阻变化,薄膜的电阻随着氙灯的开闭而呈现出规律的增加和减小(当氙灯打开时,薄膜温度升高导致电阻增加。而关闭氙灯后,薄膜温度迅速降低,薄膜电阻也会迅速减)。图5f展示了不同光强度下薄膜的电阻变化。薄膜电阻变化程度随着光强的降低而逐渐减小。例如,当氙灯光强度为100、80 和60 mW cm-2时,薄膜电阻分别增加到初始电阻的7.0%、5.2%和2.6%。
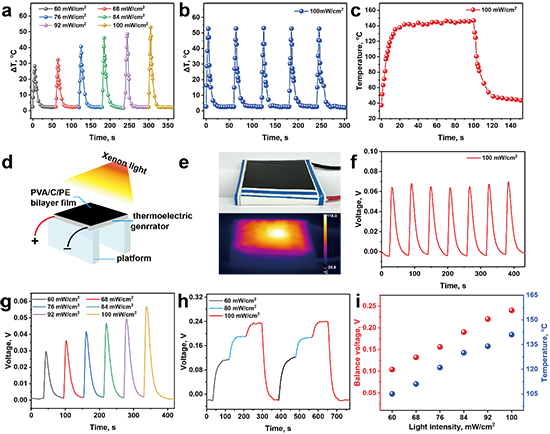
图6. PVA/C/PE双层薄膜的光热应用。
通过分析薄膜表面温度随氙灯功率的变化,在一定功率范围内二者存在着线性关系,因此可以很容易地通过调节氙灯功率来控制PVA/C/PE双层膜的温度(图6a)。PVA/C/PE双层薄膜的温度在5次开/关氙灯的循环下显示出良好的循环稳定性(图6b)。基于PVA/C层具有良好的光热转换能力,薄膜的表面温度在5 s内急剧增加到90℃,在20 s内增加到140℃,温度达到平衡后保持稳定。(图6c)。
将PVA/C/PE双层膜与商业热电发电机进行集成以进行应用演示(图6d)。在氙灯照射下,薄膜迅速吸收光能并将其转化为热能,之后将热量传递到热电发电机的上表面(图6e)。当发电机的上表面和下表面产生温差后,热电发电机产生电流输出。如图6f所示,当热电发电机上下表面的温差保持稳定时,输出电压也长时间保持稳定。热电发电机的输出电压会随着氙灯的功率的增加而增加(图6g)。在固定功率氙灯照射下,热电发电机的电压逐渐达到稳定,之后如果进一步增加氙灯功率,发电机电压则会进一步升高并逐渐达到稳定 (图6h)。热电发电机的最大输出电压与平衡温度随氙灯功率的变化如图6i所示。当氙灯功率从60 mW cm-2增加到100 mW cm-2时,热电发电机的最大输出电压从0.11 V上升到0.24 V,平衡温度从106℃上升到140℃。上述结果说明了PVA/C/PE双层膜有望应用于与户外便携式电源器件和光伏转换器件等进行集成。
压力的施加可导致薄膜导电路径的缩短,从而减小通道电阻[50]。当对PVA/C/PE双层膜施加压力时,导电C颗粒之间的距离会缩短,导电路径会增加,从而导致薄膜电阻的降低。当压力释放时,导电路径发生分离,电阻逐渐增大。如图7a所示,当向PVA/C/PE双层薄膜传感器施加435.5 kPa的压力时,薄膜电阻降低到初始电阻的97%。图7b展示了薄膜电阻的减小的程度随着施加压力的增大而增加。图7c则展示了传感器具有良好的压力循环稳定性,在对传感器施加一定压力循环72次后,该传感器仍然良好的稳定性。
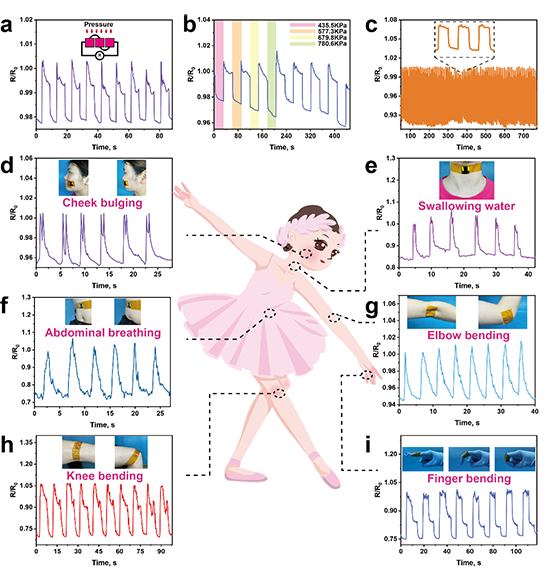
图7. PVA/C/PE双层膜的压力响应应用。
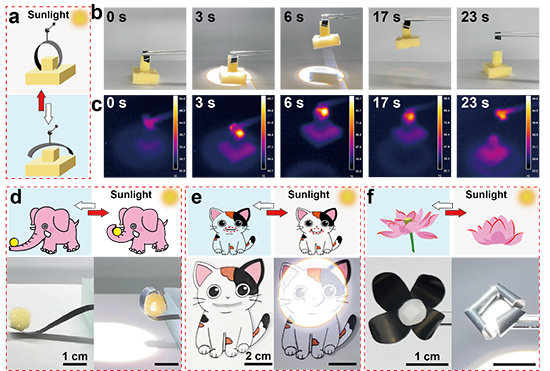
图8.PVA/C/PE双层膜的光响应应用。
他们设计了由氙灯驱动的抓手,能够改变面部表情的机器猫,实现卷曲和恢复的象鼻和能够盛开与闭合的仿生花作为光响应的应用展示。在氙灯照射下原本张开的抓手逐渐收卷 (9.8 mg) 实现对自身重量14倍的物体的捕捉,关闭氙灯后抓手逐渐打开释放物,具体过程见视频S6。
视频S6. 氙灯驱动实现对物体的捕获。
该过程的示意图如图8a所示。抓取过程对应的过程图和热红外图则分别如图8b和 图8c所示。除此之外,PVA/C/PE还有望用于仿生学相关领域。图8d展示了象鼻状机器人在氙灯刺激下卷曲实现对小球的捕获,具体过程见视频S7。
视频S7. 氙灯驱动实现象鼻卷曲。
图8e展示了氙灯驱动下实现猫咪表情的变化。在没有光照时,猫咪处于不开心的状态。一旦光照发生,猫咪立刻表现出愉悦的状态。此外,用该双层薄膜制备的仿生花朵还可以实现氙灯驱动下的盛开与闭合(图8f)。当该仿生花暴露在光照下时,原本盛开的花朵会逐渐关闭,而关闭氙灯后,花朵逐渐恢复到初始盛开状态,具体过程见视频S8。

视频S8. 氙灯驱动实现仿生花的开闭。
这些例子表明PVA/C/PE双层薄膜在智能机器人和智能设备的等领域具有一定的应用潜力。
综上所述,本工作中开发的PVA/C/PE双层薄膜呈现出制备过程简单、结构稳定性好、价格低廉、功能多样等优点。因此,它在可穿戴设备、运输、光电转换设备集成和临床辅助治疗等领域有着巨大的应用潜力。
论文链接:https://www.sciengine.com/SCMs/doi/10.1007/s40843-023-2619-7
- 武汉大学陈朝吉/四川大学张伟 ACS Nano:仿生梯度水凝胶电解质界面优化构筑稳定锌离子电池 2025-07-21
- 广工高粱课题组 Adv. Mater.: 基于聚乙烯醇缩醛相变液体的全季节非对称热致变色窗 2025-06-03
- 华南理工大学郭建华教授团队 AFM:可多层组装泡孔结构的聚乙烯醇/碳复合气凝胶实现宽带微波噪声双吸收和水下形状记忆效应 2025-05-14
- 中国科大陈昶乐团队邹陈/陈佳伟 Macromolecules:超分子动态交联实现聚乙烯/聚丙烯共混物的原位增容 2026-03-12
- 中山大学高海洋教授课题组《Macromolecules》:杂化不对称α-二亚胺镍催化剂制备多峰聚乙烯 2026-02-12
- 长春应化所王保力研究员团队 Macromolecules:利用催化剂的“限域作用”和“氟效应”制备解缠结超高分子量聚乙烯 2026-02-06
- 西安交大郑海丰教授团队 Angew:自然光驱动共轭微孔聚合物合成 - 实现真实塑料废弃物高效光催化升级回收 2026-06-05
