近期,南方科技大学力学与航空航天工程系杨灿辉团队与机械与能源工程系葛锜团队合作在《自然通讯》(Nature Communications) 上发表题为“Polyelectrolyte elastomer-based ionotronic sensors with multi-mode sensing capabilities via multi-material 3D printing”的论文,报道了通过多材料数字光固化3D打印技术一体化设计制造基于聚电解质弹性体的多模式传感离子电容传感器。该研究解决了传统离电传感器稳定性差和功能性单一的问题,为可拉伸离电传感器的设计、智造与应用提供了新的解决方案。

图1 皮肤启发的多模式传感离电传感器 (a) 人体皮肤内多种力感受器示意图 (b) 人体皮肤可以感知单一的力学信号如压拉、压、压+剪、压+扭 (b) 基于多材料数字光固化3D打印技术制备具有多模式传感能力的离电传感器

图2 聚电解质弹性体的设计、制备与光学、力学、电学性能以及热、溶剂稳定性

图3 离电传感器的可打印性与性能 (a) PEE存储模量和损耗模量随光固化时间的变化曲线 (b) 固化时间与能量密度随层厚的变化关系 (c) 打印的PEE阵列展示 (d) 3D打印和手动组装的PEE/DE双层结构的180°剥离曲线 (e) 3D打印的PEE/DE双层结构本体断裂示意图 (f) 手动组装的PEE/DE双层结构界面断裂示意图 (g) 基于PEE和基于LiTFSI掺杂离子弹性体的电容式传感器的ΔC/C0随时间变化曲线 (h) 基于PEE的电容式传感器无离子泄漏 (i) 基于LiTFSI掺杂离子弹性体的电容式传感器离子泄漏示意图

图4 拉伸、压缩、剪切、扭转离电传感器 (a) 拉伸传感器原理示意图 (b) 电容-拉伸应变曲线 (c) 压缩传感器原理示意图 (d) 有/无微结构的压力传感器的电容-压力曲线 (e) 剪切传感器原理示意图 (f) 一种剪切传感器实物图 (g) 不同灵敏度的剪切传感器的电容-剪切应变曲线 (h) 剪切传感器的疲劳测试曲线 (i) 扭转传感器原理示意图 (j) 一种扭转传感器实物图 (k) 不同灵敏度的扭转传感器的电容-扭转角曲线 (l) 扭转传感器的疲劳测试曲线

图5 组合式离电传感器 (a) 拉压组合传感器示意图 (b) 器件实物图 (c) 拉压组合传感器等效电路图 (d) 单一传感模式下的器件信号 (e) 压缩激励下的电容-圈数变化曲线 (f) 拉伸激励下的电容-圈数变化曲线 (g) 拉压组合变形下的信号谱 (h) 压剪组合传感器示意图 (i) 器件实物图 (j) 压剪组合传感器等效电路图 (k) 单一传感模式下的器件信号 (l) 压扭组合传感器示意图 (m) 器件实物图 (n) 压扭组合传感器等效电路图 (o) 单一传感模式下的器件信号
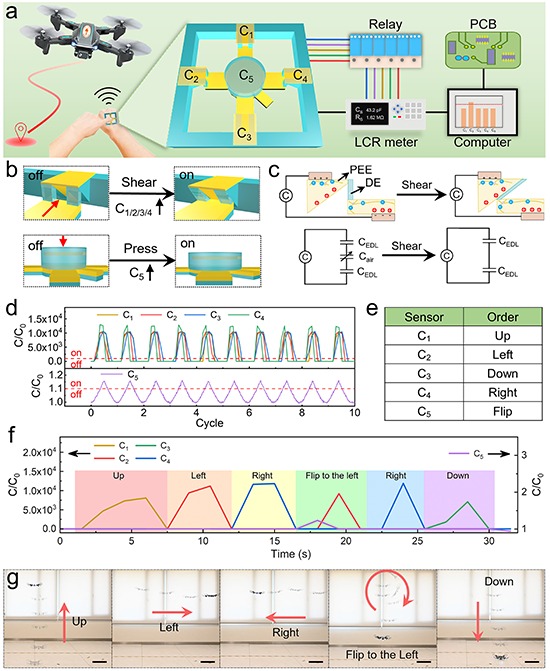
图6 组合式离电传感器用于无人机的远程无线操控 (a) 无人机控制系统示意图 (b) 组合式离电传感器中剪切传感模块工作模式示意图 (c) 剪切传感模块工作原理 (d) 传感器五个通道电容信号测试 (e) 指令编译逻辑 (f) 组合式离电传感器实时电容信号 (f) 不同时刻的无人机飞行状态
最后,研究人员展示了一个由四个剪切传感器和一个压缩传感器组成的可穿戴遥控单元,并将其连接到一个远程控制系统,用于远程无线控制无人机的飞行,如图6所示。这个可穿戴遥控单元中的四个剪切传感器负责感知手部的手指运动,用于控制无人机的方向。而压缩传感器则用于感知手指的压力,控制无人机的翻滚。这种可穿戴遥控单元的设计可以实现人机交互,提供更加灵活的控制方式。
南方科技大学力学与航空航天工程系科研助理李财聪(现为香港科技大学(广州)博士生),机械与能源工程系博士生程健翔和力学与航空航天工程系博士生何耘丰为论文共同第一作者,合作作者包括机械与能源工程系博士生何向楠和力学与航空航天工程系科研助理徐子怡(现为兰州大学博士生),南方科技大学力学航空航天系助理教授杨灿辉与机械与能源工程系副教授葛锜为论文共同通讯作者,南方科技大学为论文唯一单位。
论文链接:https://www.nature.com/articles/s41467-023-40583-5
- 南科大杨灿辉、王敏《Adv. Mater.》:基于聚电解质弹性体的高灵敏、高稳定离电式柔性压力传感器 2023-12-17
- 扬州大学吴德峰/解文媛团队《ACS AMI》:双交联复合有机水凝胶的多模式传感 2022-12-04
