具有可逆性、可重构性和复杂性的软材料在生物医学、柔性电子、人造肌肉和软机器人等领域具有潜在的应用价值。在软材料中响应光、热、溶剂、电场和磁场等刺激的三维形状转换的动态控制为软体机器人器件带来了多功能性。编程软材料的形状变化需要精确控制其机械响应的方向性和大小。尽管近年来该领域发展迅猛,但在不添加变形和流变优化添加剂的情况下,制造单片和远程可编程的各向异性活性软材料仍然面临巨大的挑战。
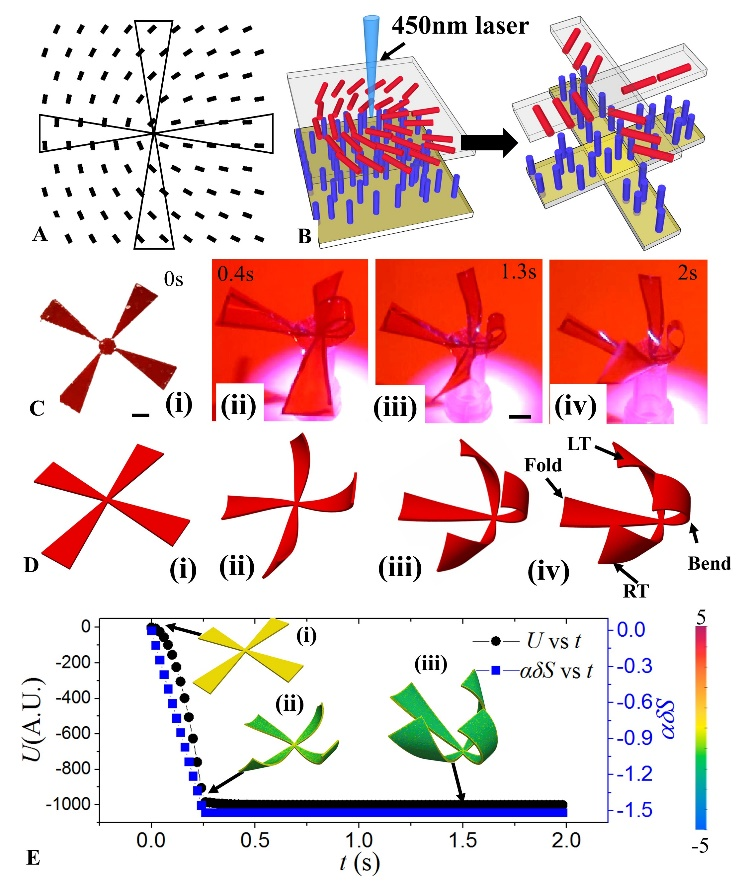
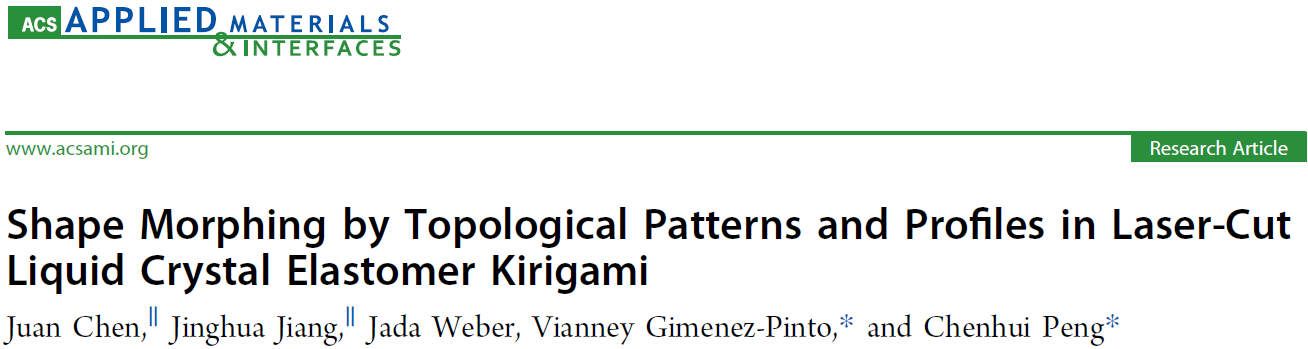
图1. 具有+1/2缺陷的液晶弹性体。
液晶弹性体 (LCE) 有序交联,是可以通过诸如光和热等外部刺激轻易改变形状的聚合物。近期,中国科学技术大学彭晨晖教授团队将液晶弹性体与剪纸相结合,通过弹性体拓扑结构以及外部几何形状的各种排列组合,实现了复杂、快速、不受束缚、远程和可编程的单片弹性体形变。这些弹性体还可以实现其他很多功能,比如模仿蝴蝶振翅,花蕾,可双向旋转且由光驱动的风车,以及双模式移动的软体机器人。为未来开发用于软机器人、柔性电子和生物医学的多功能器件提供了机会。该工作以“Shape Morphing by Topological Patterns and Profiles in Laser-Cut Liquid Crystal Elastomer Kirigami” 为题发表在《ACS AMI》上。该团队陈娟博士和蒋景华教授为共同第一作者,Vianney Gimenez-Pinto教授和彭晨晖教授为此工作通讯作者。
该团队将一个具有+1/2缺陷的液晶弹性体通过激光切割成图1的形状,使这个单片的弹性体在蓝光LED的照射下,能够同时具备弯曲、折叠以及左旋和右旋扭曲的形变。图1E所示的仿真结果表明,序参量S和相应的总势能U的变化与液晶弹性体的宏观形状变形不同步。图2显示的是具有拉胀结构的液晶弹性体。具有拉胀结构的材料在被拉伸时,垂直拉伸方向会膨胀,这就使得材料拥有良好的吸震和抗断裂的能力,有广阔的应用前景。图2H-O表明,当两个弹性体的几何形状完全相同,但内部拓扑缺陷不同时,所获得的形变会有很大的区别。一个在x轴方向上收缩更多,而另一个则是在y方向上形变更大(图2G)。

图2. 拉胀结构的可编程液晶弹性体。
设计和制造可编程软材料,创造复杂具有连续3D形状变化的起伏表面仍然是一个挑战。为此,该研究组证明了,如果在拓扑液晶弹性体内部采用扭曲向列结构,在光驱动下会出现一系列起伏的3D形貌,见图3。例如,图3A-B显示沿圆周方向每45°交替伸展和弯曲变形的拓扑模式。顶部和底部基材的设计局部相互垂直,在样品厚度上形成扭转向列结构。环形的液晶弹性体在光照下转变为具有四个凸起和四个凹陷的起伏形状。
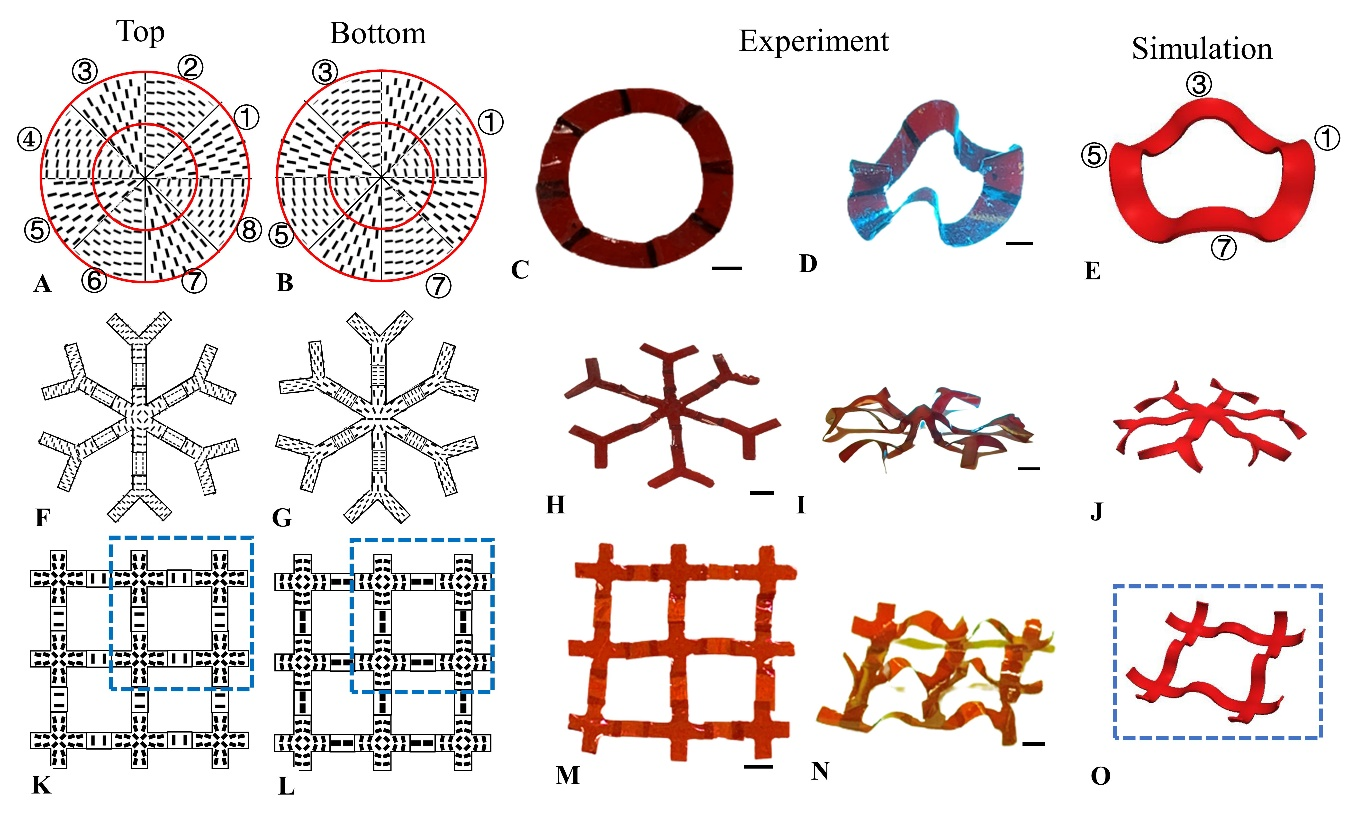
图3. 具有扭向列构型的可编程拓扑液晶弹性体。
图4是两个光驱动的动力机械装置,通过改变几何形状和内部缺陷设计,可以实现顺时针以及逆时针的转动。液晶弹性体被切割成蝴蝶翅膀的形状,并且两边翅膀的设计非对称。将两只蝴蝶粘贴在一个用锡纸制作的支架上,图4C。整个装置被架在针尖,以减少摩擦。均匀的光源被放置在动力机械装置的右侧,由于每次蝴蝶翅膀经过光源处都会产生一定的形变,产生光学压力驱动装置,从而将光能转化成机械能,动力机械装置得以持续旋转。不同的几何形状和内部缺陷的弹性体对光的反应不同,如图4A中装置会产生超过150°的过度弯曲,从而逆时针转动,而根据图4J设计的装置只会形成小角度弯曲,这会导致它顺时针旋转。图5 中的软体机器人,当光顺一个方向重复迅速扫过时,其起伏表面能够推动它沿x轴方向移动。而将它翻面后,内部拓扑结构发生改变,LED光扫过后,它可以在x和y方向上都有位移。
该实验和模拟结果有助于我们更好地理解活性软材料的拓扑、几何形状和材料形变。它未来在机器人、生物医学和柔性电子领域设计多功能设备领域有广阔的应用前景。
图4.顺时针和逆时针旋转的光驱动动力机械。

图5. 一个拓扑液晶弹性体的双模式运动。
原文链接:
DOI:10.1021/acsami.2c20295
https://pubs.acs.org/doi/10.1021/acsami.2c20295
- 斯坦福赵芮可教授团队 Mater. Today:热驱动多孔液晶弹性体用于宽范围可逆声波调控 2026-06-20
- 南京邮电大学赵强/马云/张雨霞团队 Nat. Commun.:实现具有高发光不对称因子的稳定胆甾相液晶聚合物网络 2026-05-23
- 中科院化学所赵彤研究员课题组 AFM:基于液晶工程的双有序策略制备兼具高强度与高导热性能的邻苯二甲腈纳米复合材料 2026-05-21
- 北化秦培勇、司志豪、曹鹏飞 Adv. Mater.:用光给高分子分离膜“续命” 2026-06-16
- 加州理工学院高伟课题组 Nat. Mater.:分子级整合弹性体-水凝胶双相材料 - 构建兼具组织粘附与多功能集成的新型生物电子平台 2026-06-12
- 四川大学王玉忠团队 AFM:兼具高强度、韧性与回弹性的热塑性弹性体 2026-06-03
- 华南理工孙桃林教授团队 Macromolecules:拓扑结构调控制备高强度仿生水凝胶 2026-04-28
