功能材料的加工成型,是新型刺激响应软体机器人研究的难点之一。与此同时,纤维的加工成型技术已在纺织工业中受到广泛的研究与应用。若将水凝胶纤维加工成为软体机器人,水凝胶纤维的快速刺激响应能力与柔韧性将有效的提升软体机器人性能。然而,目前刺激响应凝胶纤维的发展主要面临两个难点:
第一,水凝胶纤维的生产方法的兼容性差,目前已有的微流控纺丝、静电纺丝、熔融纺丝,和墨水直写纺丝等方法均对纤维单体溶液的物理性质有额外要求或需要相对快速的固化过程;
第二,水凝胶纤维由于其含水量较高,机械强度差,即便在较低应力下也容易发生断裂,无法实现机器等自动化编织。
因此,现有报导水凝胶编织均仅限于简单结构,且由刺激响应水凝胶编织而成的软体机器人尚未见报导。
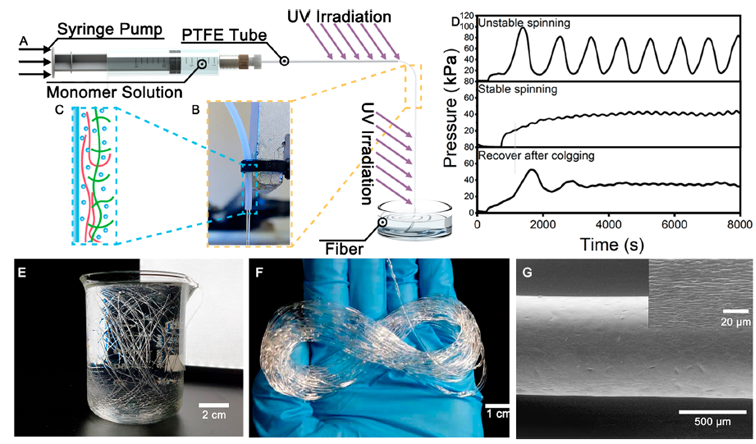
图1. 自润滑纺丝方法与水凝胶纤维表征
基于此,本文作者提出了一种利用水凝胶前体溶液聚合过程中线性高分子自由移动产生润滑层(自润滑现象)的纺丝方法,并利用三甘醇的干燥与塑化效应将制备的纤维强度有效提升。其中水凝胶前体溶液由线性高分子聚(2-丙烯酰胺-2-甲基丙磺酸) (PAMPS),单体丙烯酰胺(AAm)构成。在聚合过程中,AAm逐渐通过自由基聚合形成三维高分子网络,而PAMPS不参与反应在前体溶液中随机运动,不可避免的,部分PAMPS会被部分/全部排出到PAAm形成的网络之外,并可自由移动。此层表面的PAMPS与溶剂水分子一起,形成了润滑层,将水凝胶网络与容器分离,并润滑水凝胶网络的移动。基于此,研究人员提出了一种自润滑纺丝工艺(图1),并对产生的纤维进行了表征。
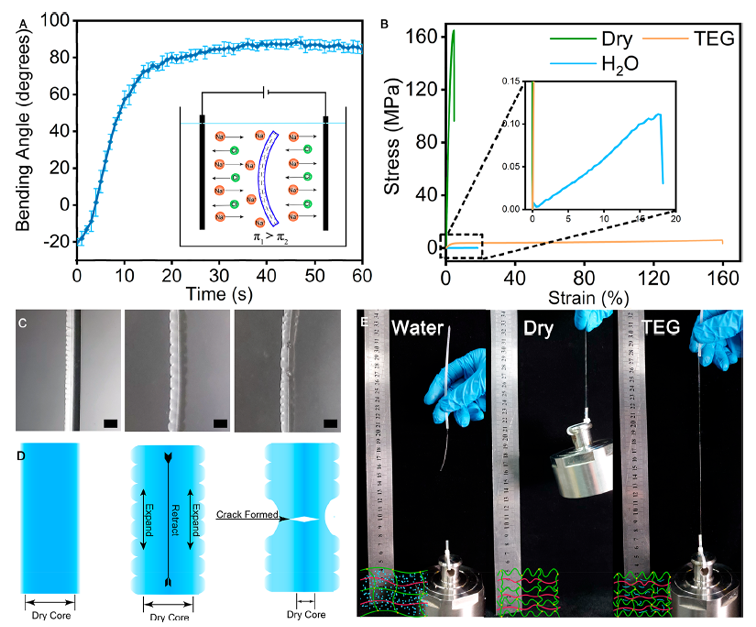
图2.凝胶纤维电响应与拉伸强度表征。
然而此纤维机械强度依旧不足以支持进一步的加工与应用。因此,作者将水凝胶纤维置于三甘醇中对其进行了溶剂置换,在此过程中,水凝胶纤维中的水分子被移除带来机械强度提高,同时少量三甘醇进入到凝胶网络中,相较简单干燥的干胶纤维,三甘醇置换所得的凝胶网络得以维持一定柔韧性。
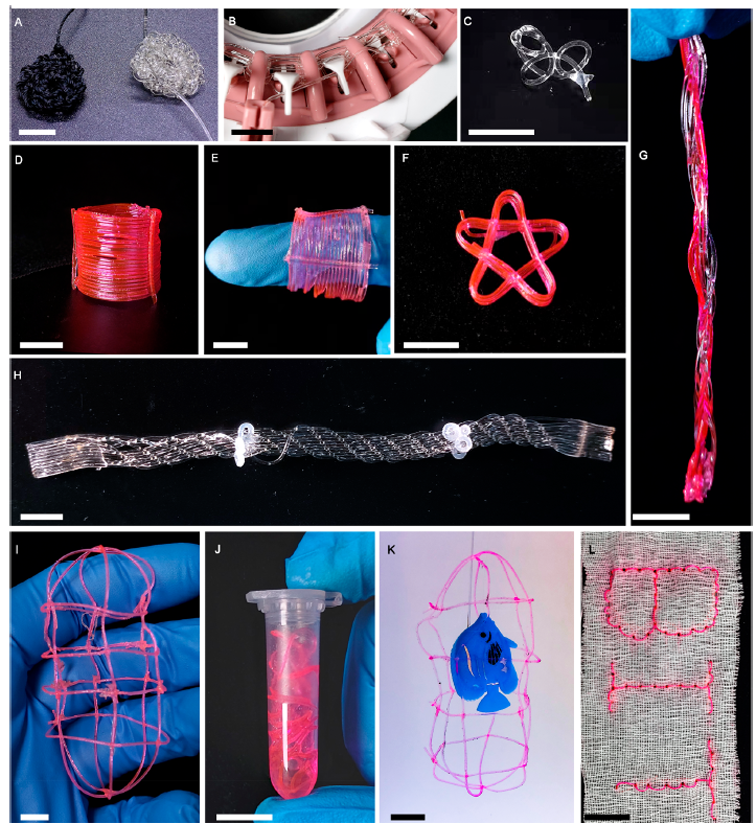
图3.凝胶纤维编织结构。
凝胶纤维在之后被利用不同的纺织方法制成为钩针花、机编布、堆积圆柱与五角星、辫子,空心笼等形状。
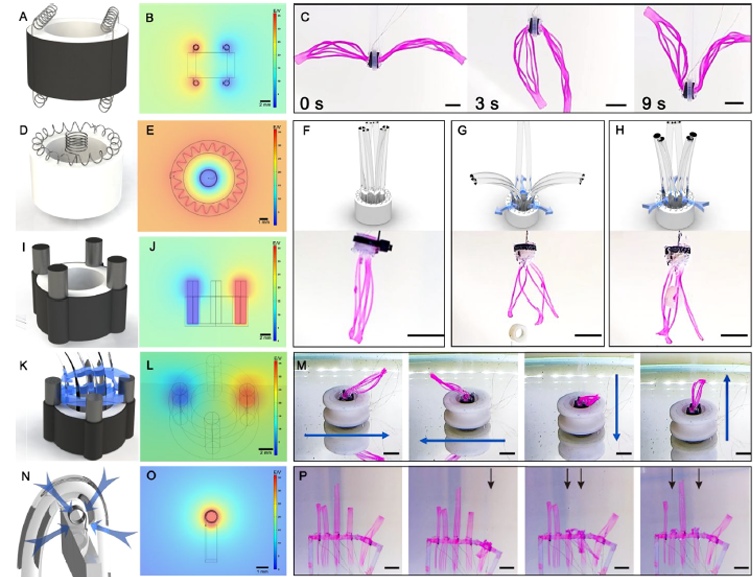
图4.凝胶纤维仿生软体机器人。
最后,作者利用COMSOL有限元模拟辅助进行了电极的设计,将电极与编织结构相结合,制造出了一系列水下仿生软体机器人。
研究成果于2020年10月19日在线发表于ACS Nano,北京理工大学化学与化工学院本科生段翔宇与于静怡为论文共同第一作者,北京理工大学化学与化工学院赵扬研究员为通讯作者,北京理工大学为第一通讯单位。
论文信息与链接:
Duan, X.; Yu, J.; Zhu, Y.; Zheng, Z.; Liao, Q.; Xiao, Y.; Li, Y.; He, Z.; Zhao, Y.; Wang, H.; Qu, L., Large-Scale Spinning Approach to Engineering Knittable Hydrogel Fiber for Soft Robots. ACS Nano 2020.
DOI: 10.1021/acsnano.0c04382
https://doi.org/10.1021/acsnano.0c04382
- 西工大刘旭庆教授团队 AFM:新一代三维编织衬垫润滑材料 - 实现摩擦能量的协同管理与耗散 2026-02-01
- 西工大刘旭庆教授、兰州化物所张招柱研究员 AFM:三维氢键网络强化的芳纶基织物自润滑复合材料 2025-09-19
- 香港城大朱平安、柴愚《Newton》:热液滴的自润滑弹跳 2025-03-07
- 南开刘遵峰/中国药大周湘/天工大王润 AFM:“颈缩”不再只是失稳 - 受蜘蛛丝启发的超强韧水凝胶纤维 2026-06-11
- 苏州大学汪晓巧教授《Nat. Commun.》:仿生蛛丝再突破!湿纺技术制备高性能水凝胶纤维 - 兼具高强韧性与智能响应性 2025-12-03
- 苏大汪晓巧教授、张克勤教授Nano Lett.:仿生超拉伸、结构可编程Janus螺旋水凝胶纤维用于应变不敏感的人体热能收集与传感 2025-02-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
