软体机器人因其特有的优势,在很多领域受到越来越多的重视。机器手作为机器人与外界交互的主要工具,在机器人设计开发中具有十分重要的地位。柔性机器手具有良好的灵活性和适应性,能够实现连续变形,使得在人-机器人以及环境-机器人的交互应用中,可以有效避免对人和物品等造成可能的伤害和损坏;更重要的是,柔性机器手能够在较为简单的控制策略下,轻松实现与复杂形状的物体的贴合(共形)接触。因此,开发能够灵活抓取和操控的柔性机器手受到科研人员的普遍关注。
近日,美国密歇根州立大学曹长勇教授团队与北华大学耿德旭教授团队合作研发了一种刚柔耦合气动柔性执行器(FHPA)和柔性仿人机器手。该柔性复合机器手采用人手仿生学结构,通过新的弯曲型刚柔耦合气动柔性执行器FHPA进行驱动,具有结构简单、轻质、灵活、输出力大和适应性强等特点(图1)。该手指状柔性执行器内部布设硅胶弹性体气囊,外侧装有薄片状束环,气囊与束环在一侧设有板状弹性骨架。施加气压后,执行器内气囊内壁受压发生膨胀,外壁径向变形受束环约束从而以产生轴向力为主,从而产生实现类手指的弯曲运动。该设计中,柔性执行器采用装配集成方式,可布设多个气囊进行驱动以产生更大的抓力。整个执行器内部软体气囊与弹性骨架刚柔相济,弹性骨架起支撑和连接作用,可提高柔性执行器刚度和弹性恢复,保证执行器在完成运动功能和柔性的同时,使柔性机器手在抓持物体时保持一定的刚度。机器手整体结构采用非对称式 - 拇指与中指相对。拇指并采用双驱动单向弯曲柔性执行器来增强机器手抓持能力,其余四指采用单驱动单向弯曲执行器。此外,在气压控制系统内装有气压传感器用于监控每根手指执行器的内部压力,以便手指变形与物体接触后,及时进行反馈调节压力以适应不同物形和重量目标物体。实验结果表明,采用该刚柔耦合气动柔性执行器制备的机器手具有良好的灵活性,能够精准完成抓、握和捏等多种动作;同时,通过调节执行器内部气压,既可以控制手指形变和输出力,又对抓取物的形状变化具有较强的适应性。该柔性机器手夹持力可达12牛,可抓持重量为1.3千克以上的物体,未来在机器人-人、机器人-环境交互应用中将具有巨大的应用潜力。

图1:刚柔复合气动柔性执行器(FHPA)结构与制作。应用该柔性执行器制作的气动仿人柔性机器手具有较好的适应性,可实现抓、握、捏、夹等动作。

图2:FHPA 形变分析。(a)FHPA几何变形与受力分析;(b)FHPA内部硅胶气囊变形前后横截面变化;(c)FHPA内部硅胶气囊变形前后剖视图;(d)不同气压下FHPA的位移和弯曲拟合曲线;(e)FHPA在充气和放气过程中弯曲角度变化;(f)FHPA弯曲角度实验数据与理论数据对比;(g)FHPA在气压0-0.3 MP,气压间隔为0.05 MPa下的弯曲变形。

图3:几何参数对FHPA性能的影响。(a)和(b)分别是弯曲角度测量装置和FHPA几何参数示意图;(c)和(d) 分别是不同厚度的圆环状和圆柱状约束环对弯曲角度的影响;(e)和(f)分别是在不同的气压作用下,FHPA的弯曲角度和输出力与执行器长度l之间的变化关系;(g)和(h)分别是在不同的气压作用下,FHPA的弯曲角度与力臂h之间的变化。
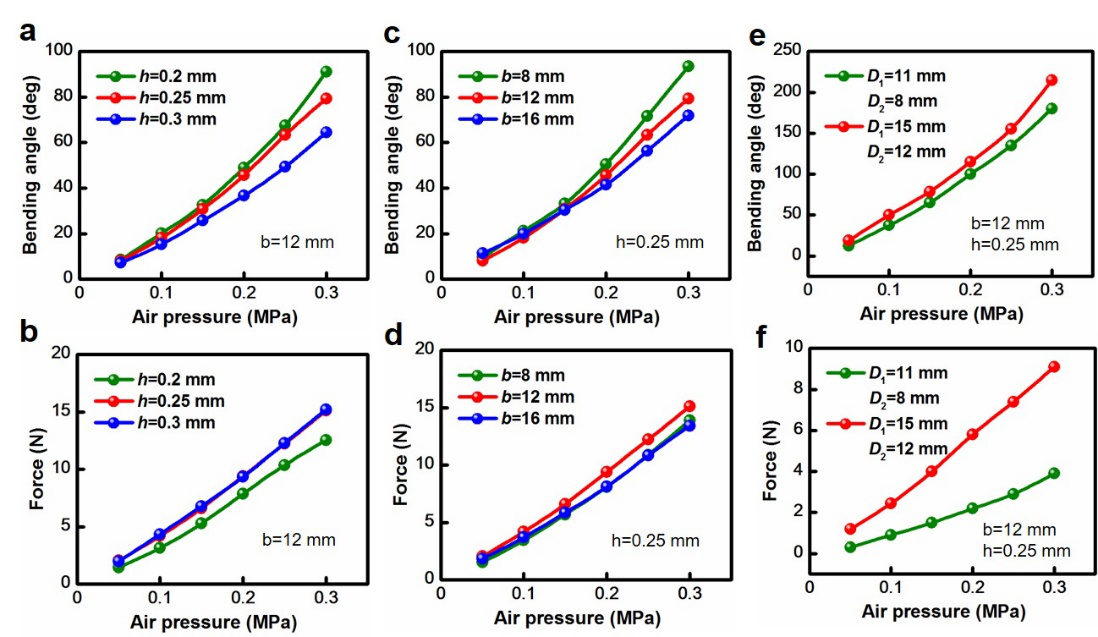
图4.板弹簧和执行器内腔气囊几何参数对FHPA弯曲性能的影响。(a)和(b)分别是板弹簧宽度对弯曲角度和输出力的影响;(c)和(d)是板弹簧厚度对弯曲角度和输出力的影响;(e)和(f)FHPA内腔气囊内径和外径对弯曲角度和输出力的影响。

图5:约束边界对FHPA性能的影响。(a)应用高分辨率CT观测FHPA内腔气囊在施加气压后的变化;(b)不同约束边界条件下FHPA内腔气囊接触变形;(c)当约束环厚度t=2 mm 时,不同形状的约束环对FHPA内腔气囊壁厚的约束效果对比;(d)和(e)是施加气压后,不同厚度和不同间隙的约束环对FHPA内腔气囊壁厚影响对比;(f)和(g)是在两种特定条件下FHPA内腔气囊横截面积与施加气压之间理论计算与实验之间的对比;(h)FHPA在两种不同形状的约束环条件下弯曲变形角度对比。

图6:FHPA内腔结构对其性能的影响。(a-d)分别是单驱动FHPA、双驱动FHPA、三驱动FHPA和四驱动FHPA;(e)和(f)分别是四种执行器弯曲角度和输出力与施加气压之间的关系。
以上相关成果发表在国际著名期刊Soft Robotics上。论文第一作者为北华大学/密歇根州立大学刘晓敏博士,通讯作者为密歇根州立大学曹长勇教授和北华大学赵云伟教授。北华大学耿德旭教授、密歇根州立大学包装学院博士生陈守锷和电气与计算机工程系谭晓波教授为论文共同作者。
论文链接: https://doi.org/10.1089/soro.2020.0001
课题组网站:www.caogroup.org
