纤维驱动器具有环境响应和传感功能,在可穿戴设备、生物传感器和人工肌肉等诸多新兴领域受到广泛关注。近年来,由合成聚合物、石墨烯、碳纳米管、形状记忆合金制备的一系列纤维驱动器,可由湿度、温度或电化学驱动并显示出快速的响应能力,但上述各类纤维的机械性能、生物相容性及生产成本难以达到平衡。而自然界中存在许多性能优异的纤维微驱动器。如蜘蛛丝,不仅在机械韧性上超过了大多数传统材料,同时牵引丝可被湿度驱动产生扭转变形超过300°/mm。这类天然材料为我们开发优化纤维驱动器材料提供了新的思路。

蜘蛛牵引丝所制备的纤维驱动器具有独特的湿度驱动行为,其扭转变形比其他传统的纤维微驱动器(如导电聚合物驱动器(0.01°/mm)和形状记忆合金纤维微驱动器(0.15°/mm))高数千倍。然而蜘蛛无法被驯养,无法实现大量生产。凌盛杰教授团队提出了使用强拉柞蚕丝(FRSFs)替代蜘蛛丝制作高性能纤维驱动器。
他们通过一种速度可控的力缫丝方式,可以从中获得连续纺长大于1km的均匀柞蚕丝纤维。这种强拉柞蚕丝(FRSFs)在机械强度和延伸性方面做出了权衡,以致其机械韧性几乎是柞蚕茧丝(CSFs)的两倍,甚至可以与蜘蛛丝相媲美。通过高分辨扫描电子显微镜(HRSEM)、小角度和广角X射线散射(SAXS/WAXS)和同步辐射傅里叶变换红外显微光谱(micro-SFTIR),揭示了FRSFs中纳米纤维不仅在取向度上明显高于柞蚕茧丝(CSFs),其纤维间界面结合与堆积也比柞蚕茧丝(CSFs)强得多。

图 1. FRSF的力学性能。a)三种不同柞蚕丝典型应力应变曲线。强拉柞蚕丝FRSF;柞蚕茧丝CSF;柞蚕自然吐在平面板上的丝PSF. b)拉伸速度为2 mm min-1时CSFs和FRSFs的应力-应变曲线。c)FRSFs与其他天然和合成材料的比强度和比刚度的比较。d)不同天然纤维和合成纤维的纤维密度、强度、杨氏模量和韧性的比较。
利用纱线纺纱技术将FRSFs组装成具有可编程驱动功率(0.77-2.1W/kg)的双螺旋微驱动器。FRSFs纤维驱动器的形状梯度与表面粗糙度使得他们能够对湿度作出快速反应。在4.8秒内,丝纤维微致动器可以达到6179.3°/s的最大旋转速度,这样的响应速度(1030r.p.m.)大于由棉、亚麻毛或Tunel32制成的湿度驱动微驱动器,甚至能与由电操作的碳纳米管微驱动器相媲美。该微驱动器的平均驱动功率为2.1W/kg,是蚕茧丝纤维驱动器的两倍。FRSFs微驱动器出色的驱动性能让其成为多种应用的潜力选择。该团队展示了如何使用这些FRSF微驱动器来促进伤口愈合。
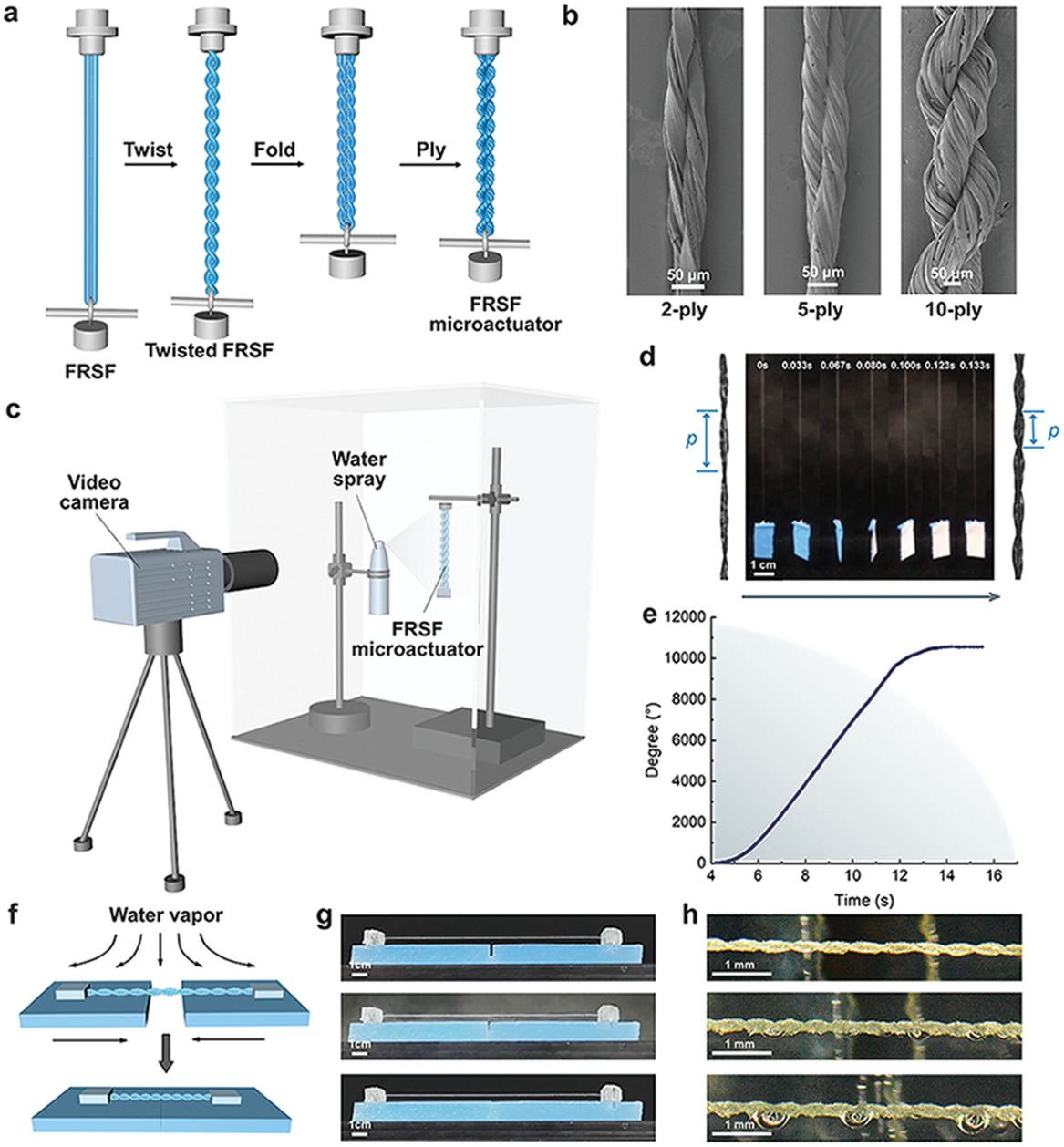
图 2. a) 基于FRSFs的微驱动器制造工艺示意图。b) 2、5、10股微驱动器的扫描电镜图像。c) 自制的水雾驱动FRSF微驱动器性能检测装置。d) 微驱动器工作过程的图像(p为螺距)。e) 驱动微驱动器时旋转角度与时间的关系。f) 促进伤口愈合的微驱动器示意图。g)微驱动器促进伤口愈合的过程。h) 显微镜下提取水凝胶的微驱动器。
该团队进一步研究了FRSF微驱动器的驱动机理:表面粗糙度和形状梯度触发并促进水在微驱动器上的渗透,从而导致FRSFs的膨胀和收缩。这种协同效应会自发地解开FRSF单纱,并保持微执行器的整体加捻平衡。文章中推导了螺旋结构与驱动功率之间的定量关系,从而可编程实现不同应用所需的驱动功率。通过控制所用纤维的数量,可以对丝纤维微驱动器的驱动功率进行精确编程。FRSF微驱动器作为一种天然的蛋白质纤维,具有机械性能高、加工性能多样、生物相容性好等优点,有望在生物医学、智能纺织品、软机器人、人机界面等多个新兴领域得到应用。
以上相关成果发表在Advanced Science (Adv. Sci.2020,1902743)上。论文的第一、二作者分别为上海科技大学物质学院研究生林诗绘和物质学院本科生王臻,通讯作者为凌盛杰教授。
- 北京化工大学蔡晴、喻盈捷团队 AFM:双交联激活蚕丝蛋白压电活性 - 构建压电–导电骨修复支架 2026-07-16
- 苏大李刚、余嘉/牛津大学陈凯丽 Biomacromolecules: 牛角瓜纤维/蚕丝蛋白复合多功能水凝胶敷料 2025-08-19
- 塔夫茨大学David Kaplan 院士/Chunmei Li 教授团队 Nat. Commun.:基于蚕丝蛋白的生物活性塑料 2025-01-05
- 杭师大朱雨田教授、陈建闻副教授/南开刘遵峰教授 AFM:基于多尺度亲水-疏水界面超快响应与超大形变的湿气响应Janus纤维驱动器 2025-10-18
- 东华大学熊佳庆课题组 ACS Nano:全纤维驱动器实现环境监护型智能口罩 2025-03-12
- 东华大学熊佳庆/周欣然 ACS Nano:VOC感知型全纤维驱动器 2025-02-28
