MIT研发形变机器人:可适应不同任务
2017-09-29 来源:cnBeta
当很多团队还在设计特定用途的机器人的时候,麻省理工的研究人员们已经在思考如何打造一款可以变换各种外形、以适应不同任务的新式机器人。该机器人名叫“Primer”,可通过磁铁来控制行走、滚动、滑行等动作。在一篇题为《基于折纸外骨骼的机械变形》论文中,科学家团队详细介绍了他们是如何通过在一块预制的塑料板上加热来‘穿衣’、以及遇水来‘脱衣’的。
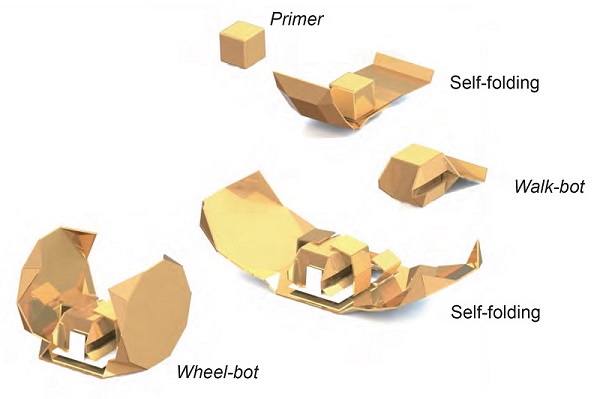
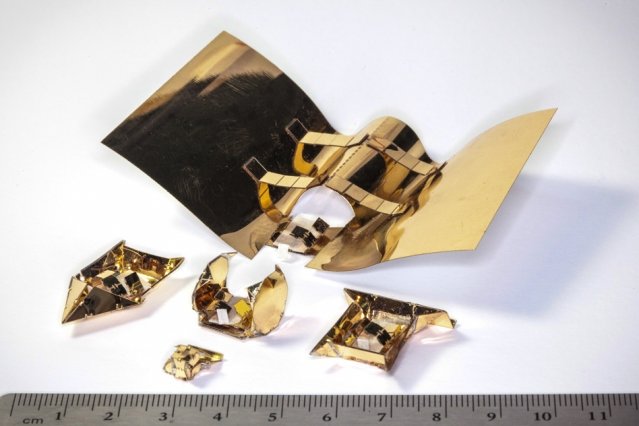
Primer 一次可‘穿上’不止一件外套。尽管看起来不是很惊悚,但这项研究的真正成就是让它变得如此小巧。
想象一下,如果将这项技术拓展到全尺寸,未来我们有望见到大黄蜂是如何在一片热塑料上变身为一辆科迈罗的。
Transforming Robots with Origami Exoskeletons
麻省理工学院计算机科学与人工智能实验室主任兼项目首席研究员 Daniela Rus 表示:“我想象有一天,我们能够定制使用不同武器和附加属性的机器人,并在必要时对其进行更新”。
原文链接:http://news.mit.edu/2017/superhero-robot-wears-different-outfits-different-tasks-0927
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 不列颠哥伦比亚大学李宏斌教授团队《Nat. Commun.》:利用蛋白质折叠和解折叠构建形状记忆及形变蛋白质水凝胶 2022-01-21
- 麻省理工学院赵选贺教授团队:新技术能在一秒内打印出磁活化材料 2018-06-14
- 加州理工学院和苏黎世联邦理工学院用热形变材料打造无需电机和电池的划水机器人 2018-05-17
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
