近日,北京航空航天大学罗斯达教授团队提出了一种空间差异化激光编程技术,用于数字化制造具有自由形态变形能力的激光诱导石墨烯基软执行器(LIG-SA)。该研究突破了传统刺激响应策略中制造简便性与运动复杂性难以兼得的限制,通过跨尺度控制激光能量和扫描方向,编码出直向弯曲、定向螺旋、刚性支撑和柔性连接四种典型变形单元,并基于仿生设计研制了多款抓取机器人和爬行机器人。
2026年6月10日,相关成果以“Hierarchical laser-programmed soft actuators for designing bionic robots with freeform morphing shapes”为题发表于Science Advances,论文第一作者为北京航空航天大学博士生锅雨寒和师资博士后韩明光,通讯作者为北京航空航天大学罗斯达教授。
【研究背景:仿生软体机器人面临的形态可编程瓶颈】
无论是章鱼触手的定向缠绕、尺蠖的节律蠕动还是海豹身体的协调运动,自然生物的多模式运动能力一直激励着软体机器人领域的革命性发展。其中,具备复杂三维变形能力的软执行器,已成为智能软机器人系统的核心组件。然而,传统刺激响应材料受限于均质结构或组分,仅能实现溶胀、收缩和均匀弯曲等简单形变。尽管近年来的局部编程策略在提升形变复杂性方面取得了一定进展,但传统制造方法在加工分辨率与材料多样性之间始终存在取舍,且将多种不同驱动模式集成于单一单片结构中往往需要复杂、多步的制造工艺。如何在保持结构一体性的同时实现自由形态变形的可编程设计,已成为软体机器人领域亟待突破的瓶颈。
【研究成果:从均质响应到自由形态变形】
为解决这一难题,研究团队提出了一种空间差异化激光编程技术,利用激光诱导石墨烯(LIG)的一步式数字化加工优势,通过跨尺度控制激光能量和扫描方向,同时调节材料异质性和结构层次性,实现了电热分布与刚度各向异性的解耦。具体而言,团队开发了两种核心加工策略:差异化激光能量(DLE)和定向激光扫描(DLS)。DLE通过选区控制激光能量,决定LIG不同区域的碳化程度和电阻值,从而赋予每个局部区域特定的焦耳热温度和弯曲曲率,聚焦区域(高电阻)在相同电流下表现出更高的温度和弯曲曲率,形成关节式运动;DLS则通过编程激光扫描方向,产生阵列排布的田埂-沟槽微结构,沿扫描方向约束弯曲、垂直扫描方向促进弯曲,从而实现从直向弯曲到定向螺旋的精确控制。通过将DLE与DLS策略相结合,研究团队成功编码出四种基本运动单元:直向弯曲、定向螺旋、刚性支撑和柔性连接。在此基础上,任意组合多种模式变形单元即可实现具体的器件设计:从具有单关节、双关节或多关节的条带状和十字形执行器,到闭合环状和可折叠结构,均可通过局部区域的自由编程实现从二维前驱体向复杂三维几何构型的精准演化。
【仿生应用:从触手式抓取到多向爬行机器人】
研究团队进一步将这一设计范式拓展至仿生软体机器人领域,成功开发了系列仿生抓取机器人和爬行机器人。
章鱼触手式抓取机器人:受章鱼触手正交肌肉静水动力学与粘弹性能力管理的启发,团队设计了单触手机器人的三种运动模式——整体均匀卷曲用于群体目标采集、远端弯曲用于受限空间探测、螺旋缠绕用于细长物体提取。在此基础上,进一步开发了四触手抓取机器人,通过配置不同变形角度,实现了对球形、方形、矩形、圆锥形及组合异形目标的自适应共形抓取。
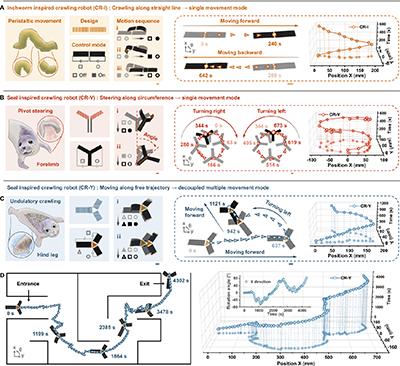
尺蠖与海豹爬行机器人:仿照尺蠖的间歇锚定-释放蠕动机制,团队设计了条带双向爬行机器人,通过交替驱动两条独立单元实现前进与后退。进一步模仿海豹陆地步态,设计了转向+蠕动复合的多功能机器人,实现了360°全向旋转和自由轨迹导航。该机器人充分利用其内在的导电性、焦耳加热能力和自适应运动模式,成功展示了狭缝跨越、电热融冰和自主电路修复等多场景任务能力。
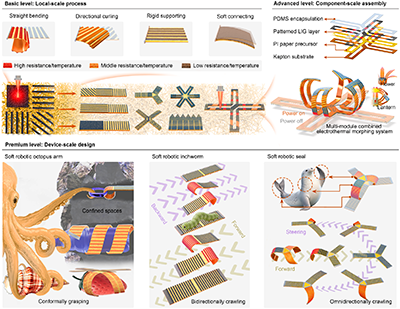
图1空间差异化激光制造LIG-SA的跨层级设计概念示意图,用于构建具有多模态性能调控、可配置结构和自由形态变形能力的仿生软体机器人
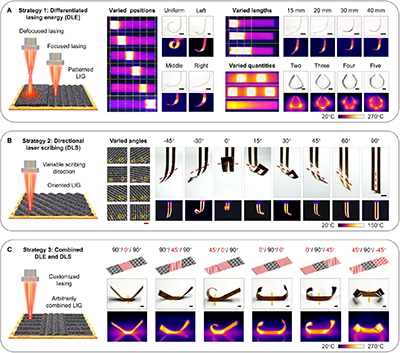
图2 LIG-SA自由形态变形的代表性加工策略
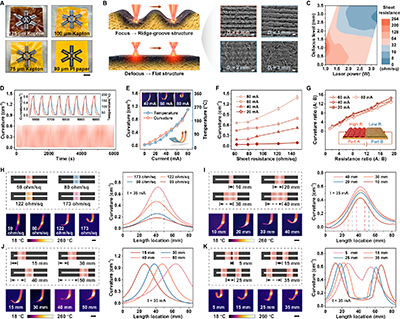
图3 DLE基LIG-SA的加工机理、材料性能与形态变形表征

图4 DLS基LIG-SA表征及DLE+DLS组合策略实现的各种变形姿态
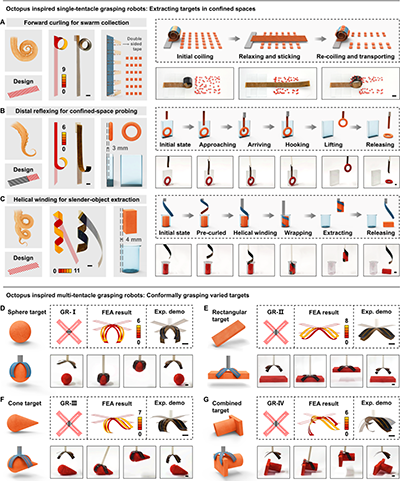
图5 章鱼仿生触手抓取机器人,用于多形态目标的自适应共形抓取
 .
.
图6 尺蠖与海豹仿生爬行机器人,用于多模式运动

图7 海豹仿生爬行机器人执行任务避障等多功能展示
【结语】
这项研究让软体执行器从“单一形变”进化到“自由形态变形”。它不仅为仿生软体机器人的可编程设计开辟了新路径,更通过单步数字化制造将先进制造与物理智能相融合,实现了从抓取到导航、从融冰到电路修复的多场景任务能力。可以预见,未来的软执行器将不再是简单的弯曲单元,而是能够多模式变形并从容应对复杂环境的智能守护者。
该研究得到了国家自然科学基金创新群体项目、面上项目、博新计划A类项目等的支持。
原文链接:https://doi.org/10.1126/sciadv.aeb1989
下载:论文原文。
- 西安交大王莉团队 Sci. Adv. 封面:三维软智能器件的制造突破 →跨尺度执行器和高精度温度场传感器的3D打印实现 2024-03-15
- 中国科大龚兴龙教授团队《ACS Nano》:具有可维持塑性变形和可编程磁驱形状恢复的三响应软驱动器 2023-12-05
- 南京大学陆延青教授团队 AFM:面向柔性智能光子学的仿生自驱动液晶执行器 2023-06-03
- 哈工大赫晓东、彭庆宇/合工大胡颖《ACS Nano》:基于天然材料的多重刺激响应可生物降解仿生软体机器人 2023-11-11
- 江南大学 AFM:各向异性纺织多尺度结构构筑用于医疗可穿戴的仿生软体机器人 2022-11-20
- 清华大学孙洪波教授/吉林大学张永来教授《AS》综述:基于氧化石墨烯的湿度响应仿生软体机器人 2021-03-17
