本工作提出了一种可编程事件驱动(Programmable and event-driven,PED)触觉传感器,模仿人体皮肤多层次机械感受器的响应机制,采用梯度金字塔超表面结构设计,实现对不同强度压力的高精度感知。通过逐级触发不同高度的微结构单元,有效调控上下敏感层接触面积,赋予器件优越的压力解耦与事件驱动特性,实现了压力强度的连续编码,显著延缓信号饱和的发生。PED触觉传感器展现出优异的性能,最大灵敏度达2501?kPa?1,检测范围覆盖至420?kPa,较传统均匀微结构接口分别提升了350%和300%;同时具备极低的压力检测限(2?Pa)与快速响应时间(12?ms),可灵敏识别微弱压力变化及高频动态输入,展现出卓越的实时触觉感知能力。在应用层面,本工作集成分布式PED触觉传感器构建了具备空间分辨能力的物体识别系统,通过一维卷积神经网络对抓取信号进行特征提取,实现了高达97.2%的物体轮廓识别准确率。此外,基于PED触觉传感器开发的数据手套交互系统有效突破了传统手柄交互的视觉遮挡与功能受限问题,支持多指精细控制与双向触觉通信,显著增强了虚拟环境中的沉浸感与真实感。进一步地,通过引入了基于实时压力反馈的自适应抓取机制,使机械手能够动态调节抓取策略,实现无需人工干预的高精度、无损抓取操作。
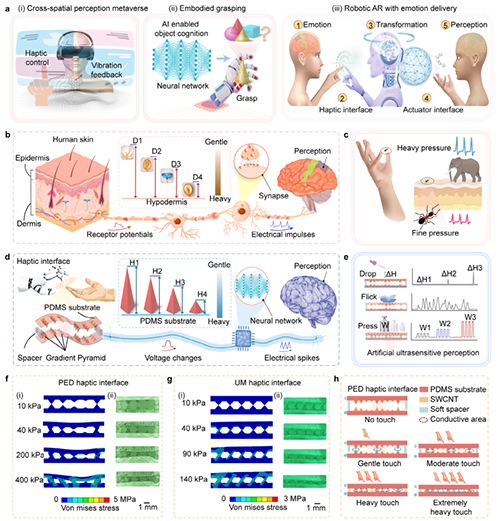
图1 PED触觉传感器的仿生启发和传感机制研究
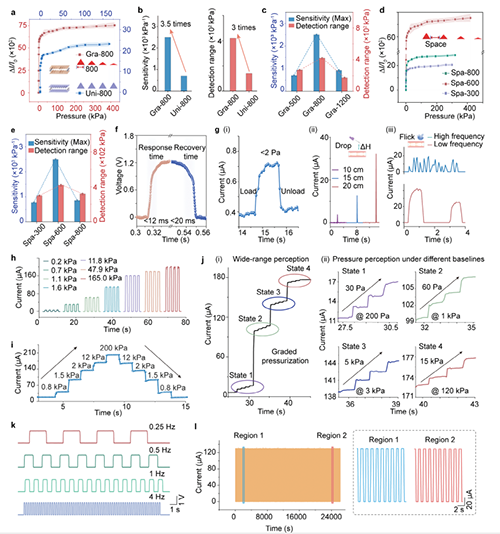
图2 PED触觉传感器的关键力电性能测试
图3 融合事件驱动机制的触觉认知系统用于高精度物体识别
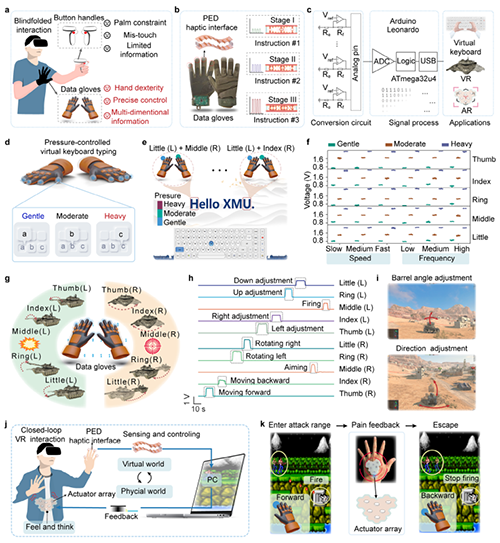
图4 基于数据手套的触觉闭环系统赋能虚拟与增强现实交互
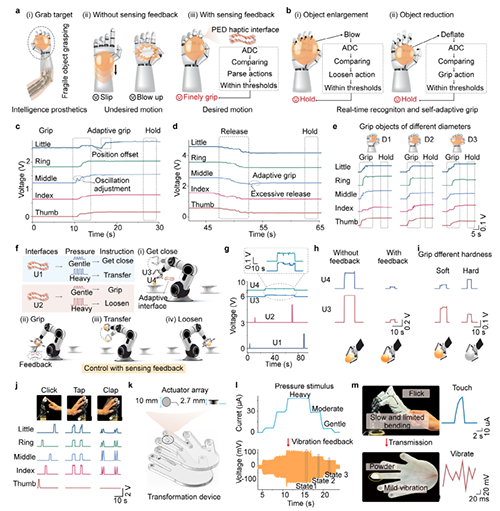
图5 具有情感反馈的自适应机器人抓取系统
相关研究成果以“Highly programmable haptic decoding and self-adaptive spatiotemporal feedback toward embodied intelligence” 为题发表在Advanced Functional Materials(2025, 10.1002/adfm.202500633)期刊上。论文的第一作者为厦门大学博士生林万胜,通讯作者是厦门大学廖新勤副教授。该项研究工作得到了国家重点研发计划、国家自然科学基金、福厦泉自主创新示范区协同项目、福建省自然科学基金、中央高校基本科研业务费等项目的资助。
论文信息:Wansheng Lin, Yijing Xu, Shifan Yu, Huasen Wang, Zijian Huang, Zhicheng Cao, Chao Wei, Zhong Chen, Zeliang Zhang, Zhenyu Zhao, Qingliang Liao, Yuanjin Zheng, and Xinqin Liao*. Highly programmable haptic decoding and self-adaptive spatiotemporal feedback toward embodied intelligence. Advanced Functional Materials 2025, 35: 2500633. (IF=18.5,一区TOP)
论文链接:https://doi.org/10.1002/adfm.202500633
- 澳门大学周冰朴团队 Adv. Mater. : 基于仿生磁化微脊结构的“粘-滑”过程重构 2025-03-21
- 密歇根州立林少挺教授团队 Adv. Mater.:抗疲劳力致变色水凝胶 - 赋能新型触觉传感器 2024-10-16
- 澳门大学钟俊文课题组 Adv. Mater.:用于盲文-语音转译的静电型智能织物 2024-03-21
