在现代机器人技术中,如何感知和操控柔软、易碎的物体(如生物组织、易碎食物及柔性电子器件)一直是一个巨大挑战。现有的基于视觉的触觉机器人主要集中在刚性物体的感知与操作,但在应对柔软或脆弱物体时,往往难以实现精确判断与解析。近日,密歇根州立(MSU)林少挺研究团队在《Advanced Materials》上发表了一篇题为《Fatigue-Resistant Mechanoresponsive Color-Changing Hydrogels for Vision-Based Tactile Robots》的文章,创新性地利用了具有优越抗疲劳特性的力致变色水凝胶,设计了一种低成本、寿命长的基于视觉的触觉传感器。该传感器能够将接触表面的应力直接转化为可识别的图像,从而感知材料硬度、物体形状、空间位置及施加的压力。这一突破有望填补机器人触觉感知与人类触觉感知之间的根本差距,推动触觉机器人技术迈向新高度。密歇根州立大学林少挺教授为通讯作者,博士生刘佳斌为文章的第一作者。文章的其他作者包括普渡大学Yu She教授和石溪大学Wei Li教授。
如图一所示,抗疲劳力致变色水凝胶(FMCH)由高缠结的聚合物网络和适量的吸湿盐组成,能够在偏振光下呈现出可逆、稳定且可预测的颜色变化。FMCH展现出优越的机械性能,其拉伸性达到原长的6倍,断裂韧性高达3,000 J/m2,疲劳阈值可达400 J/m2。更为重要的是,它在多达10,000次的循环拉伸下,性能稳定,并且在应变速率范围为0.02 s?1至0.35 s?1的范围内,力致变色性能始终稳定。这种具有优越抗疲劳特性且对应变率不敏感的力致变色软材料,非常适合用于需要长期承受动态负载的触觉传感领域。
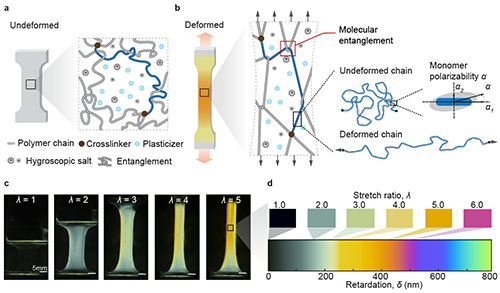
图1. 抗疲劳力致变色水凝胶的分子设计
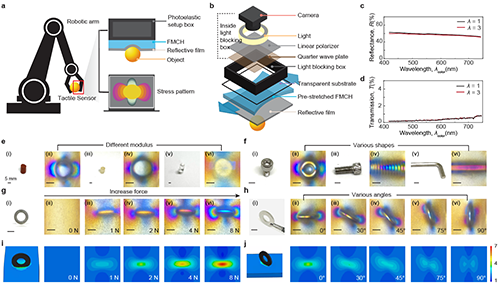
图2. 抗疲劳力致变色水凝胶的分子设计在触觉机器人领域的应用
软体机器人领域:这项工作报告了一种全新的基于视觉的触觉机器人,以填补机器人触觉感知与人类触觉感知之间的关键差距。
展望
文章链接:https://doi.org/10.1002/adma.202407925
密歇根州立大学-林少挺课题组-诚招博士/访问学者
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 西南林大杜官本教授、杨龙研究员团队 Nano Lett.:尺度匹配纳米限域调控链协同行为 - 实现高抗疲劳软水凝胶 2026-05-27
- 成都大学魏竟江/王清远团队 Adv. Mater.:溶剂交换辅助机械训练制备仿肌腱的抗疲劳导电有机水凝胶 2026-05-09
- 宾夕法尼亚大学杨澍团队 Adv. Mater.: 研发多模式力致变色液晶弹性体微管 2025-06-16
- 北化马志勇课题组 Macromolecules:双螺力敏色团ABPX在单/双网络弹性体中的力致变色与光致变色机理差异 2025-06-12
- 绍兴文理杨东朋博士、国科大杭高院黄少铭教授 Nat. Commun.:具有热开-关特性和多色记录-擦除功能的力致变色光子晶体纸张 2024-08-16
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
