不同于传统的刚性机器人,近年来由柔性材料构筑的软体气动机器人,在使用中更具灵活性、柔韧性,与人体和脆弱的物品交互过程中具有更高的安全性,因而在智能可穿戴设备、人机交互及非结构化环境与复杂操控系统中具有广阔的应用前景。但目前普遍应用于气动驱动器的柔性膜材料存在多向大变形、非线性弹性、亲肤性差以及制备工艺复杂等问题,因而限制了气动软体机器人的体积比功率、致动速度、可操控性、可扩展性及其在可穿戴领域的应用。
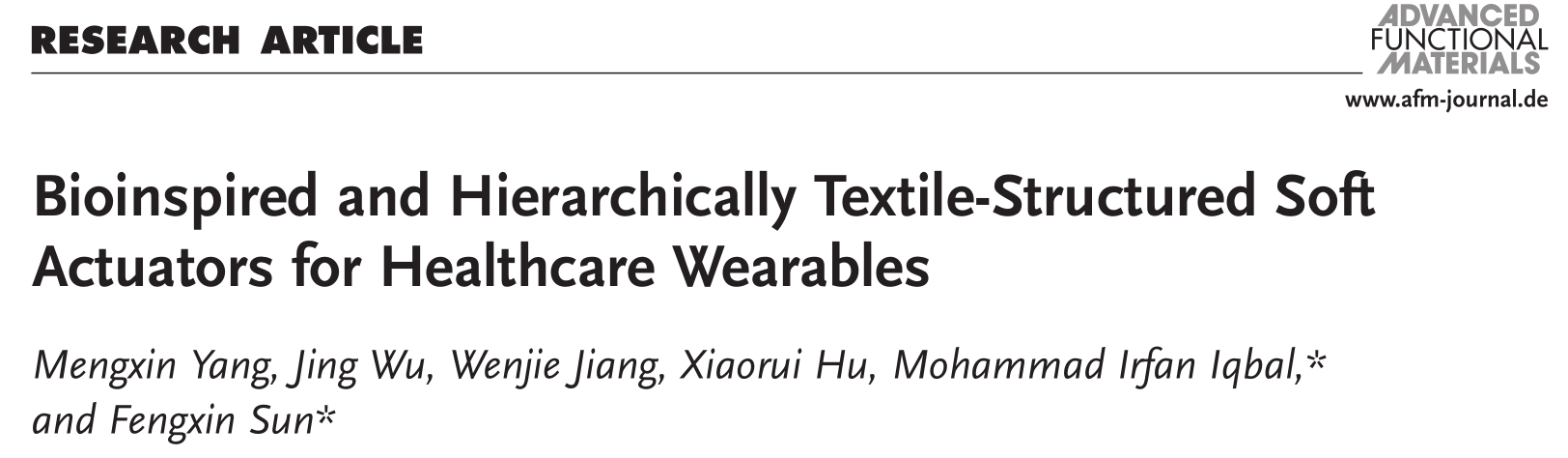




图3对比了夹心衬垫针织基的驱动器和传统的双面针织基驱动器的驱动性能。夹心衬垫针织基的驱动器具有较好的阻塞力输出和曲率变形,其输出力和弯曲曲率均比传统双面针织基驱动器高出约6倍,而体积膨胀和驱动时间仅为传统针织基驱动器的0.22和0.16倍,表明所开发的驱动器同时具备较好的弯曲柔度和工作能力。此外,设计的驱动器体现了较好的循环驱动效果和优良的耐磨性与力学鲁棒性。
图4表明,基于改进的拉压双模量理论可以有效预测驱动器的弯曲变形情况,进而阐明几何参量和力学参量如何影响驱动器的运动形式,然后可反向对纺织软体驱动器的变形曲率和运动进行简单的编程设计,实现了转曲、螺旋、弯曲等多重运动形式,设计出通过单一气源控制的顺次变形的软体抓取机器人,避免了复杂的连接结构和多源气动控制系统。
所设计的夹心衬垫针织基驱动器具有柔软、亲肤、舒适的特性,可作为辅助人体肢体运动或手指运动的人工肌肉动力源,通过反复施压和释压,使驱动器膨胀弯曲和回复,从而驱动关节完成运动。此外,还可以通过不同纺织结构的组合设计,实现施压过程中驱动器的不同膨胀变形,可以针对人体穴位进行按摩和理疗。
该研究利用花式纱线形态和夹心衬垫针织结构的分级设计,实现了超各向异性和双模量的软体气动机器人的制造,并展现了高效的驱动变形,同时克服了软体驱动器的柔软性和输出力难以兼顾的问题。此外,这种利用纺织结构开发软体驱动器的方法,具有极好的可扩展性和设计简便性,不用复杂的成膜技术和模具设计,便可以实现低成本、大尺寸、不同形态、多重运动模式的气动驱动器的可编程制备。该研究可为基于几何与结构设计人工肌肉驱动器提供新的开发范式,有望促进柔性结构在软体驱动器领域的新发展。
论文链接:https://doi.org/10.1002/adfm.202210351
下载:Bioinspired and Hierarchically Textile-Structured Soft Actuators for Healthcare Wearables
- 武汉大学常春雨教授课题组 AFM:高强度、各向异性矿化甲壳素可吸收螺钉 2026-06-04
- 福州大学于岩/吕晓林 Adv. Mater.:仿生力学各向异性离子凝胶 2026-01-21
- 中山大学付俊/南京林业大学韩景泉 AFM:基于Hofmeister效应的各向异性、抗溶胀导电水凝胶用于水下监测 2025-11-07
- 哈工大(深圳)何思斯团队 AM:高性能全聚合物水系准固态纤维电池 - 为透气可穿戴设备提供可靠能源 2026-06-05
- 中山大学付俊教授团队 AFM 综述:超薄可穿戴柔性电子器件及其智能健康监测应用研究进展 2026-05-30
- 武汉大学吴伟教授团队 AFM:用于下一代自适应可穿戴设备的全印刷温度-压力双模传感电子织物 2026-04-22
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
