柔性压力传感器是电子皮肤、智能机器人、可穿戴设备等领域的核心器件之一。随着人机交互技术和智能制造的迅速发展,传感器不仅要具备超高灵敏度,以感知微弱的触碰或力变化,还需要保持宽线性响应范围,以在大载荷下实现准确、可重复的信号输出。然而,这两项性能指标在传统传感体系中往往难以兼得——灵敏度的提升通常伴随早期饱和与非线性失真,而线性范围的拓宽又往往以牺牲灵敏度为代价。这一“灵敏度-线性度矛盾”已成为限制柔性压力传感器进一步发展的关键瓶颈。
为应对这一挑战,四川大学材料科学与工程学院张传芳教授团队提出了一种全新的设计策略:通过MXene触发化学实现梯度模量水凝胶的快速可打印化,并结合3D打印技术精确构建多尺度微穹顶结构。该策略实现了材料模量与几何结构的协同调控,从根本上缓解了灵敏度与线性度之间的固有矛盾。
2025年11月10日,研究成果以《MXene-Triggered 3D Printing of Gradient-Modulus Iontronic Pressure Sensors for Adaptive Robotic Grasping》为题,发表在Advanced Functional Materials上。
研究亮点
1.MXene触发化学:让水凝胶“快速、可控”固化
团队提出一种基于MXene表面活性位点的自由基触发聚合策略,利用MXene的过渡金属中心和-OH/-O/-F端基高效催化过硫酸铵分解,极大加速聚合反应速率。相比传统引发剂体系(如Fe2+或抗坏血酸),MXene触发体系能在数分钟内完成凝胶化,并通过调控MXene含量实现从硬到软的可编程模量梯度。这种可控凝胶化行为为后续的3D打印与力学梯度设计奠定了坚实的化学基础。
2.模量梯度× 微穹顶结构:双通道线性化机制
研究团队采用直写式3D打印(DIW)技术,将MXene触发的水凝胶打印为“硬-中-软”梯度分布的微穹顶阵列。这种结构在受压时呈现逐层传递与缓释应变的特点,有效延迟机械饱和。通过有限元模拟(FEA)与实验对比,研究者发现该梯度结构在整个加载过程中均可保持稳定应变分布,有效避免传统均一模量材料在高压下出现的局部塌陷与非线性输出,实现了灵敏度与线性度的协同优化。
3.性能全面突破:高灵敏度、宽范围、优稳定
3D打印所得的离子-电容复合传感器在0-440 kPa的压力范围内保持线性输出,平均灵敏度达538 kPa-1。此外,传感器在400 kPa条件下经1500次加载-卸载循环仍保持稳定输出,无明显漂移或衰减,显示出优异的结构与界面稳定性。即便在微小压力下,器件依然能输出清晰可辨信号,实现对极弱触觉的可靠感知。
4.自适应抓取:从实验室走向“智能手指”
将该传感阵列集成至柔性机械手的三指端部后,团队展示了机器人对草莓、豆腐、金属块等不同材料与形状目标的实时抓取感知。传感器输出信号能精确反映接触力分布与物体刚度变化,实现无损抓取与自适应控制。这种高精度压力反馈系统展现了MXene-3D打印柔性传感器在智能机器人、人机交互及电子皮肤领域的巨大应用潜力。
图文导读
1.MXene 触发化学驱动的梯度模量水凝胶压力传感器设计策略
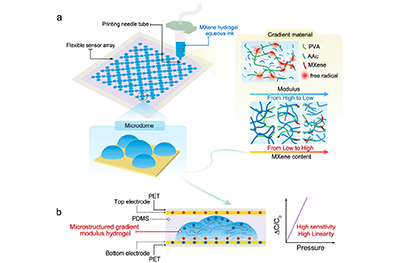
为解决柔性压力传感器在灵敏度与线性度之间长期存在的性能矛盾,研究团队提出了基于 MXene 触发聚合化学与微结构设计相结合的 3D 打印策略。通过调节 MXene 含量,实现了从上至下“硬-中-软”的垂直模量梯度,使结构在受压过程中产生分级应变传递,从而显著延缓结构饱和。
具体而言,打印过程中依次沉积含不同比例 MXene 的水凝胶油墨,并在打印瞬间与 APS 交联固化,实现力学模量的连续可编程调控。最终所得的微圆顶阵列嵌入柔性电极之间,构建出离电式压力传感单元。在外界加载下,梯度模量与几何设计的协同作用使应力在不同层中逐级释放,既保证了低压区的高灵敏度,又实现了高压区的线性响应(图1)。
2.MXene 调控下的水凝胶结构与力学性能演化
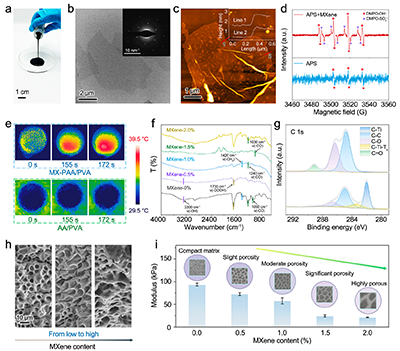
为揭示 MXene 在凝胶化过程中的化学作用机制,研究对 MXene-PAA/PVA体系进行了系统表征。MXene 纳米片具有优异的层状结构与胶体稳定性(图2a-c),并能促进自由基生成,从而显著加速聚合反应速率。电子自旋共振结果证实,MXene 触发的自由基浓度远高于纯水凝胶体系(图2d),同时热成像监测到聚合反应放热明显提前(图2e)。
结构表征表明,随着 MXene 含量的增加,水凝胶网络孔径逐渐增大,内部交联密度降低(图2h),导致压缩模量从约 94 kPa 降至 21 kPa(图2i)。这种由 MXene 启动的聚合动力学调控,实现了水凝胶模量的精确可调,为后续梯度打印奠定了材料基础。
3.基于有限元模拟的梯度模量与结构设计优化
为揭示梯度模量在力学响应中的作用机制,研究团队利用有限元分析(FEA)系统模拟了不同模量分布下微穹顶单元的受力与变形行为。结果表明,传统单一模量结构在高压区迅速进入结构饱和,接触面积增长趋缓;而引入“硬-中-软”梯度分布后,压力可在垂直方向逐层传递与释放(图3a,b),有效延缓高压下的结构塌陷。进一步地,研究对不同孔隙率与微穹顶排布方式的应力分布进行了比较。模拟结果显示,4E1H 结构在低压区具有更高灵敏度,而梯度模量(GHML)设计在高压区保持出色线性度,两者结合可实现全区间灵敏度与线性度的平衡(图3c,d)。
实验上,通过调控 MXene 含量实现了可打印油墨的流变性能匹配,使打印层之间形成连续的模量梯度。原位 SEM 压缩测试进一步证实了梯度层间的逐级形变行为,与模拟结果高度一致(图3e-k)。

4.3D 打印压力传感器的性能验证
在器件性能测试中,梯度模量微结构传感器表现出优异的综合特性(图4a-j)。
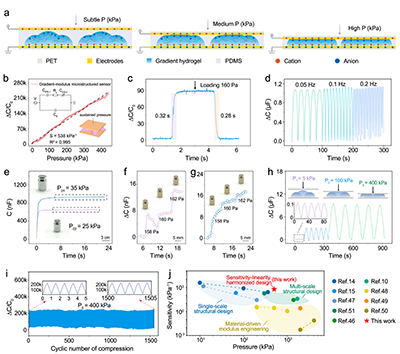
首先,在宽压力范围(0-440 kPa)内,传感器展现出近乎理想的线性响应(R2 = 0.995),灵敏度高达 538 kPa-1(图4b),显著优于多数已报道的离子型或电容型传感器。这一性能得益于层级结构的逐级变形与界面极化的协同放大效应。在动态响应测试中,器件对 160 Pa 的微小刺激实现了约 0.3 s 的快速响应与恢复时间(图4c),信号无明显滞后。频率响应测试表明,在 0.05-0.2 Hz 的周期载荷下,输出信号稳定、可重复(图4d)。此外,器件可分辨微小压力差并在预加载条件下保持高精度识别(图 4e-g),在高压区(400 kPa)持续加载 1500 次循环仍无明显衰减(图4i),展现出出色的长期稳定性。综合性能比较(图4j)显示,本工作提出的梯度模量结构在灵敏度与线性度间实现了最优平衡。
5.自适应机器人抓取中的触觉感知演示
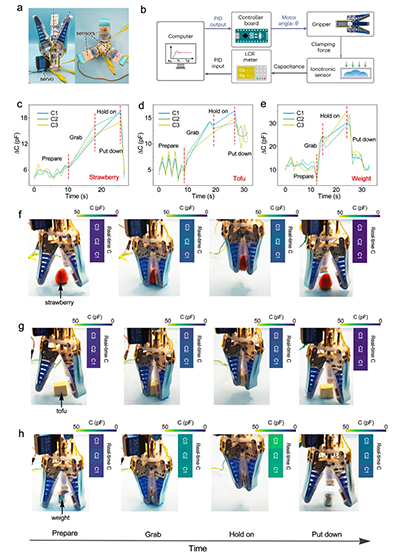
为验证其在智能感知领域的应用潜力,研究团队将 3D 打印压力传感器阵列集成至柔性机器人抓手的指尖,实现实时力反馈(图5a,b)。在抓取草莓、豆腐与金属块等不同柔度与形状的目标时,三通道传感器能独立识别触点压力变化,并通过电容信号反映抓取过程的各阶段——准备、接触、保持与释放。结果显示,对于柔软易形变的草莓,信号变化迅速且能在短时间内稳定(图5c,f);而高柔度的豆腐样品产生了更缓慢的响应曲线,反映出其显著的黏弹性缓冲效应(图 5d,g);对于刚性金属块,三通道信号几乎同步上升,表明受力均匀、接触稳定(图 5e,h)。伪彩色压力图进一步揭示了空间分辨的受力分布,证实该阵列在多点触觉感知中的高空间与时间分辨率。
该演示表明,梯度模量水凝胶传感阵列不仅可精准识别压力大小,还可区分目标材料的力学属性,为柔性机器人与人机交互提供了新的解决方案。
本研究以“材料触发+结构设计”的双重策略,为柔性压力传感器的性能优化提供了全新思路。通过 MXene 化学赋能与可编程打印的融合,研究者协调了灵敏度与线性度间的性能矛盾,并为柔性电子、软体机器人及智能仿生器件的高性能化提供了新思路。
原文链接:https://advanced.onlinelibrary.wiley.com/doi/10.1002/adfm.202522891
作者简介

张传芳
本文通讯作者
四川大学材料科学与工程学院,教授
四川大学教授,博士生导师,国家级青年人才,国家海外高层次人才引进计划入选者,四川省天府峨眉计划(青年),四川省特聘专家,四川省专家服务团专家,四川大学百人计划A类入选者,四川大学印刷柔韧交互通信电子团队负责人。历任美国能源部资助下的Drexel-UCLA合作项目的主要研究员(2012-2014),爱尔兰都柏林圣三一学院博士后(2015-2019),瑞士联邦理工学院联邦材料所高级科学家、项目负责人(2019-2022)。受邀担任70余个同行评议期刊审稿人,如Nature, Nature Comm, JACS, Angewandte, Adv. Mater., Joule, Adv. Energy Mater., Adv. Funct. Mater., ACS Nano, Prog. Mater. Sci.等,并担任欧盟研究基金(ERC starting, consolidate)、德国科学基金会(DFG)通讯评审专家。迄今发表104篇SCI论文,如Nature Energy, Nature Commun. (4篇), Adv. Mater (VIP), Angewandte, Energy Environ. Sci., Adv. Funct. Mater (VIP), ACS Nano等杂志,其中VIP论文4篇,ESI热点论文9篇,ESI高被引论文29篇。H-index为59,被Science, Nature, Nature Energy等SCI杂志引用21,000余次。他还在普林斯顿大学等高校院所及华为、中车等知名企业做了70余次学术报告。他入围2016年、2018年爱尔兰年度青年领军人物、年度实验科学家、年度实验研究员等称号,被评为2019欧洲华人十大科技领军人物、2022-2025美国科睿唯安全球高被引科学家、2025斯坦福大学全球前2%科学家及终身影响力科学家、2023四川大学课堂教学质量优秀奖、2023四川大学优秀科研人才奖。
Email:chuanfang.zhang@scu.edu.cn
【张传芳课题组招聘】
课题组诚聘博士后
专职博士后在站期间重点从事印刷固态电池、可穿戴自供能电子皮肤等相关科研工作;博士后聘期为3年(可续聘),具体管理按照四川大学材料学院相关规定执行。
一、博士后研究方向
1. 印刷固态电池:准固态电池的电极-固态电解质界面、正负极材料设计及合成;固态电解质在电极材料中的迁移动力学;固态电池的一体化批量印刷。
2. 自供能电子皮肤:高灵敏触觉传感基电子皮肤的设计、电池与电子皮肤的集成印刷、可拉伸电池与电子皮肤的设计。
二、博士后招聘条件
1. 获得博士学位不超过3年的博士,或通过博士学位论文答辩的应届博士,年龄在35周岁以下;
2. 以第一作者在知名学术期刊上发表学术论文一篇以上;具有出色的论文写作能力;具有二维材料、电化学储能器件、印刷电子、传感器、电子皮肤等领域背景。
3. 学术思想活跃,具有较强的学术能力及自主创新能力,具有良好的研究基础和立足学科前沿的研究方向与规划,能开展前瞻性、创新性的科学研究。
4. 具有良好的学术道德和职业素养,具有较强的团结协作精神。
三、博士后聘期待遇
1. 学校提供24万元的岗位年薪,省市再提供10万的博士后补贴,特别优秀的博士后税前年薪可达40万。提供住房补贴。大力协助申请竞争性的“四川大学专职博士后研发基金”(8-20万元)。符合相关政策者提供周转房,协助解决子女入托入学问题。与普通专任教师享受同等学术待遇和职称晋升等待遇。并参照校内同级人员的标准为博士后缴纳“五险一金”;
2.合作导师将大力协助其申请各类自然科学基金和人才计划;
3. 在站博士后成绩突出者,可破格申报副高职称。
4. 第一作者、四川大学材料学院为第一单位发表有影响力的科研成果可享受学院和课题组统筹发放的科研业绩奖励。
四、应聘方式
申请者请将以下资料通过邮箱发送到chuanfang.zhang@scu.edu.cn (张传芳):
1. 个人简历(包含学习和工作经历、发表论文、参与项目等);
2. 代表性论文以及其他可以证明本人研究能力及水平的相关资料
3. 邮件标题为博士后应聘。
4. 专职博士后职位常年招聘,入职时间灵活。
- 南通大学孙文旭/张雷团队 AFM:仿生界面工程设计兼具高拉伸与高灵敏度的双纳米复合水凝胶 2026-05-29
- 武汉大学吕昂团队 AFM:相分离增强的纤维素/海藻酸压离子水凝胶用于高灵敏自供电传感 2026-04-13
- 浙大伍广朋、杭师大邱化玉 ACS Nano:兼具高稳定性和高灵敏度的极紫外和电子束倍半硅氧烷光刻胶 2025-10-31
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 北京林业大学杨俊/北京口腔医院白玉兴等 AFM:基于原位凝胶化表皮压力传感器 2025-11-15
- 西南大学张同华/王蜀、河工大胡宁、重大宁慧铭 AM:构建具备超高灵敏度和宽范围检测能力的双介电层离子电子压力传感器,实现温度/压力双模态感知与静音语音识别 2025-07-24
