港中大张立教授团队《Sci. Adv.》:液态机器人清除复杂表面细菌生物膜
微生物感染是全球公共卫生重大威胁,每年导致全球近500万人死亡,其中80%以上慢性感染与顽固性细菌生物膜相关。人体内的医疗植入物表面缺乏免疫保护机制,易形成由细菌及其分泌的胞外基质构成的细菌生物膜,造成慢性菌膜感染。针对体内菌膜感染难题,香港中文大学张立教授研究团队提出磁控微型机器人“机械力清除+化学消灭“机制(Sci. adv. abq8573; Adv. Mater. 2201888; Adv. Intell. Syst. 2300092)。在此前研究中,微型机器人可以在简单管道结构内清除菌膜,但受到尺度缩放效应导致的”大驱动力-小尺寸(可达性)“矛盾限制,在复杂表面上表现不佳,难以适应医疗支架、网片等复杂医疗植入物表面形貌。
团队在此前“史莱姆机器人“研究基础上(Adv. Funct. Mater. 202112508)开发了液态抗菌膜机器人。机器人本体采用动态交联磁性水凝胶材料,具有独特的黏弹性响应特性。通过精准调控外部磁场,可激活不同响应模式:弹性模式下,机器人能在体内实现旋转、翻滚及越障动作;液态模式下则像液体般变形,深入缝隙清除顽固菌膜。团队对这一黏弹性行为进行建模,发现响应由两个特征时间尺度控制,分别是聚合物固有弛豫时间(由材料配方控制)和外磁场驱动特征时间(由外加磁场参数控制)。通过调控这两个特征驱动时间,可以选择性激活机器人的液体或弹性体响应,以应对不同体内环境。
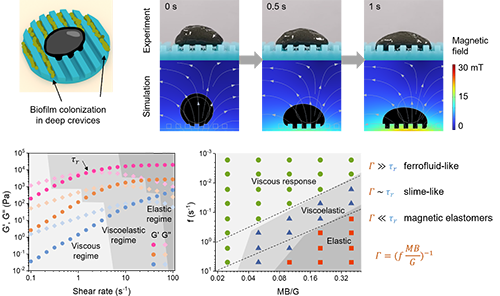
图1:外加磁场激活液态抗菌膜机器人的可控黏弹性响应。
菌膜是由细菌和其分泌的胞外基质组成的动态生命结构,其中胞外基质具有多重保护作用,使得细菌难以被通常的抗生素疗法消灭。该机器人采用三重协同抗菌膜机制:1)物理破坏:磁驱动机械力破坏菌膜胞外基质物理结构;2)化学灭杀:搭载多种抗菌剂灭杀游离细菌;3)动态吸附:吸附并移除菌膜碎片,防止感染复发。团队在体外试验环境中使用搭载抗生素和抗菌肽的机器人,研究了在不同磁场参数驱动下对菌膜胞外基质的清除和对游离细菌的灭杀效果。

图2:三重协同抗菌膜机制。
在两种不同医疗器械菌膜实测中,液态机器人展现出优秀性能:疝网补片具有三维编织孔隙结构,经机器人处理后菌膜减少84%;胆管支架金属丝间隙在处理后87%细菌失活。对于机器人在体内的成像和追踪,团队采用内窥镜X光双模导航技术,成功在猪胆管内实现抗菌膜机器人穿越金属支架的精准操作。动物实验显示,腹腔植入感染支架的小鼠经介入治疗后12天体重完全恢复,炎症反应较对照组降低40%。
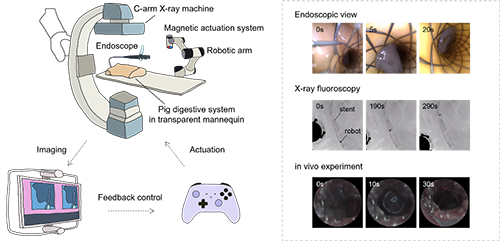
图3:用于遥控液态机器人的体内成像-驱动机器人手术平台。
该工作近期以“Liquid-bodied antibiofilm robot with switchable viscoelastic response for biofilm eradication on complex surface topographies”为题发表在Science Advances上。论文第一作者是香港中文大学机械与自动化工程学系博士生孙伯男,论文通讯作者是新加坡国立大学孙猛猛助理教授、新加坡南洋理工大学沈祖尧教授和香港中文大学张立教授。
文章链接:http://dx.doi.org/10.1126/sciadv.adt8213
