攀援软机器人因其可以提供出色的灵活性、适应性和机械坚固性,在探索和监测复杂、非结构化环境方面的应用前景广阔,引起了越来越多的关注。尽管软机器人在这一领域取得了显着进展,但单一响应的软机器人限制着机器人在平面和曲面之间灵活的转换与过渡。因此,如何通过多场协同控制软机器人在平坦/曲面上的攀爬,对拓展软攀援机器人的应用具有重大意义。
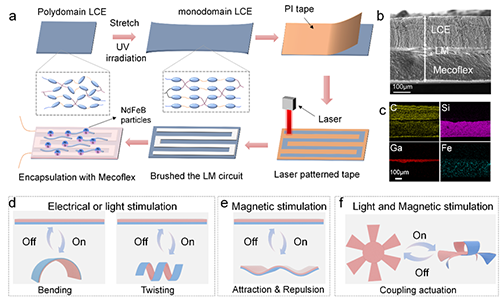
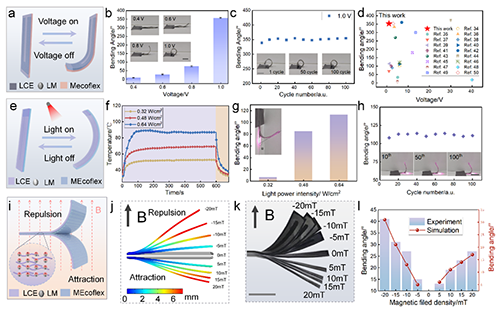
图2. LCE/LM/Mecoflex驱动器的电/光/磁驱动性能。

图3. LCE/LM/Mecoflex驱动器的螺旋弯曲性能。
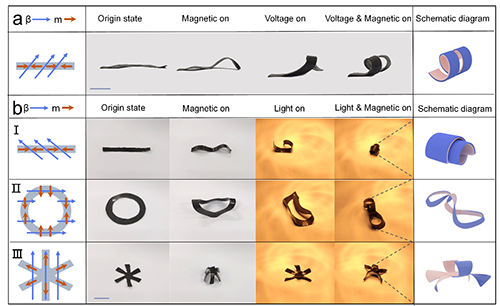
图4. LCE/LM/Mecoflex驱动器的耦合驱动性能。
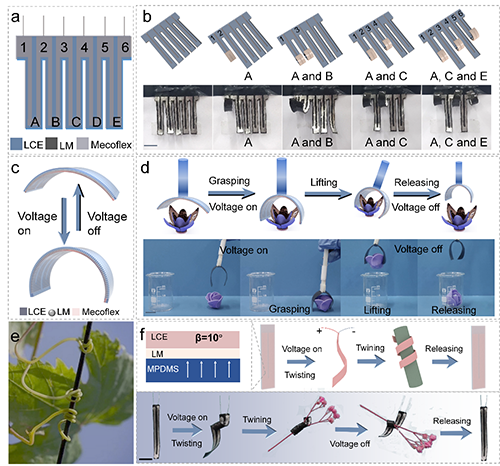
图5. LCE/LM/Mecoflex驱动器的应用展示。
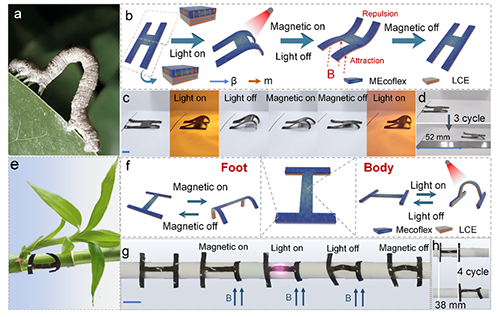
图 6. 仿生攀援四足机器人的应用展示。
综上所述,他们提出了一种受攀援植物启发的多响应和可编程驱动的LCE/LM/Mecoflex 驱动器。由于不同热膨胀和液晶相变的协同作用,LCE/LM/Mecoflex 的变形得到了进一步增加。通过设计 LCE 层中的分子取向和 Mecoflex 层中磁性颗粒磁化方向,LCE/LM/Mecoflex 执行器在施加电场、红外光场和磁场时表现出可逆、大且稳定的弯曲或螺旋弯曲行为。基于这种良好的驱动器性能,他们开发出了多种可编程软驱动器,它们可以在电/磁或红外光/磁协同作用下在二维和三维结构之间进行可逆切换。最后,一个四足机器人在平面和曲面上的爬行实验清楚地证明了所开发驱动器的灵活性,为多场耦合驱动机器人的设计和制造提供了一些启发。
原文链接:W. Li, C. Lou, S. Liu, Q. Ma, G. Liao, K. C.-F. Leung, X. Gong, H. Ma, S. Xuan, Climbing Plant-Inspired Multi-Responsive Biomimetic Actuator with Transitioning Complex Surfaces. Adv. Funct. Mater. 2024, 2414733. https://doi.org/10.1002/adfm.202414733.
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 四川大学高会乐教授课题组 AFM:二甲双胍介导的空间特异性多响应无载体自组装纳米递药系统联合化疗重塑免疫抑制微环境 2024-02-21
- 瞿金平院士华科大团队 Small:基于弱离子交换的磁性微马达集群用于可控药物递送与化疗 2023-12-10
- 合工大胡颖、张晨初/赵玉顺 AFM:仿生“变色蝴蝶”驱动器实现形变、变色与红外发射率调控协同响应 2026-06-07
- 大连理工大学韩丽、舍布鲁克大学赵越 JMCA(HOT Paper):无交联策略制备热塑性液晶弹性体驱动器 2026-04-30
- 宾大杨澍团队、UCLA金丽华团队 Science:把“打结”变成动力 - 会跳、会翻、还能“飞回来的”软体微型驱动器 2026-04-24
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
