随着柔性可穿戴电子产品的快速发展,人们对压阻传感器的性能要求越来越高。尽管在提高压阻传感器的灵敏度、传感范围和耐久性等方面取得了巨大进步,但大多数压阻传感器不能够同时响应多种机械刺激(如法向压力、面内应变或弯曲),从而导致其无法识别机械刺激的类型。此外,由于大多数压阻传感器的导电网络的各向同性,其也无法识别机械刺激的方向,这严重限制了压阻传感器在智能机器人和复杂人体运动监测中的应用。迄今为止,开发和设计能够准确识别和测量多种机械刺激类型、大小和方向的多维压阻传感器仍然是一个巨大的挑战。
近日,陕西科技大学马建中教授、鲍艳教授、张文博副教授团队受来自人体体感系统中的皮肤和肌肉的结构和生理功能的启发,通过将两个压力不敏感的各向异性应变子传感器以正交堆叠的形式分别集成在应变不敏感的压力子传感器的顶部和底部,开发和设计了一种能够识别和测量面内应变、法向压力和剪切力的类型、方向和大小的集成多维传感器,并进一步探索了其在机械手和体育训练指导中的应用潜力。
该工作以“Bioinspired Integrated Multidimensional Sensor for Adaptive Grasping by Robotic Hands and Physical Movement Guidance”为题发表在《Advanced Functional Material》上(DOI:10.1002/adfm.202313787)。
文章要点
要点一:结合同轴静电纺丝和预拉伸工艺构建了基于定向分段结构电纺膜的各向异性应变子传感器
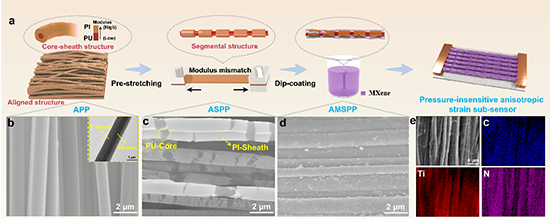
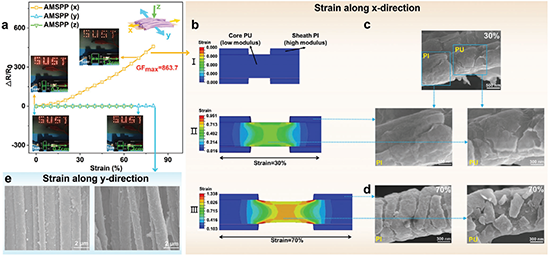
图2 AMSPP应变子传感器的传感性能和机理
AMSPP应变子传感器只响应沿x方向的面内应变,并在0-80%的应变范围内具有863.7的最大灵敏度。AMSPP应变子传感器的各向异性感应特性可归因于定向结构所导致的不同应变方向下的不同导电网络变形机制。当其受到的应变沿纤维轴向时,纤维上的MXene形成裂纹并逐步扩展,从而产生电响应;而当其受到的应变沿纤维径向时,仅仅是纤维间产生滑移,从而几乎没有电响应。AMSPP应变子传感器高的灵敏度和宽的传感范围可归因于分段结构所导致的表面应变重分布。具体地说,AMSPP上的低模量PU表面有助于在拉伸过程中形成应变集中,从而通过MXene裂纹的快速形成和扩展来提高其灵敏度,而高模量PI表面的低应变分布则通过减缓MXene裂纹的形成和扩展来拓宽其传感范围。
要点二:结合水热法和双轴预拉伸工艺制备了具有ZnO纳米线阵列的全向高度梯度褶皱电纺膜基应变不敏感压力子传感器
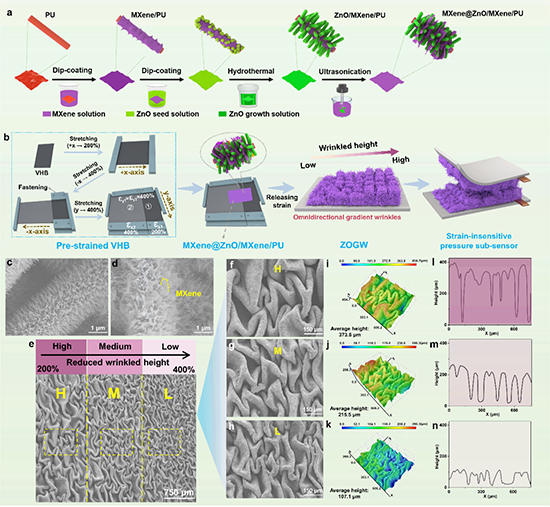
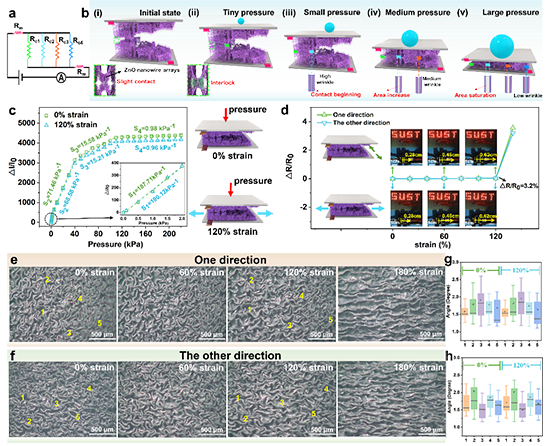
图4 ZOGW压力子传感器的传感性能和机理
ZOGW压力子传感器在0-220 kPa的压力范围内具有187.71 kPa-1的最大灵敏度,并在0-120%的应变范围内表现出96%的应变不敏感特性。ZOGW压力子传感器的高灵敏度可归因于微弱压力下ZnO纳米线阵列间形成的互锁以导致的上、下层ZOGW间接触面积的急剧变化。ZOGW压力子传感器的宽传感范围可归因于持续压力施加下高度梯度褶皱电纺膜的最高层褶皱到最低层皱褶的逐级激活所导致的上、下层ZOGW间接触面积的持续变化。ZOGW压力传感器的应变不敏感特性可归因于面内应变作用下ZOGW的微观形态几乎保持不变,这将导致ZOGW的膜电阻和上、下层ZOGW间的接触电阻保持不变。
要点三:多维传感器的构建

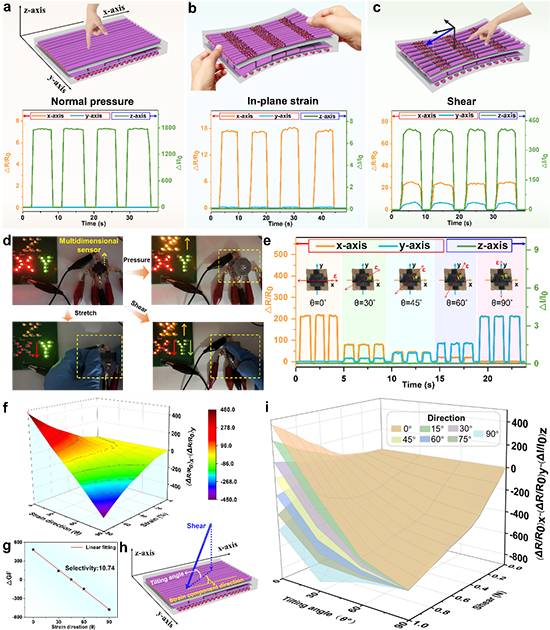
受益于三个子传感器的各向异性传感特性,多维传感器的一个典型特性是能够识别面内应变、法向压力和剪切力。此外,多维传感器能够测量面内应变的大小和方向,并具有10.74的优异应变方向选择性。最重要的是,多维传感器能够通过建立的电响应库来筛选剪切力的大小和方向。
原文链接:https://doi.org/10.1002/adfm.202313787
- 武汉大学常春雨教授课题组 AFM:高强度、各向异性矿化甲壳素可吸收螺钉 2026-06-04
- 福州大学于岩/吕晓林 Adv. Mater.:仿生力学各向异性离子凝胶 2026-01-21
- 中山大学付俊/南京林业大学韩景泉 AFM:基于Hofmeister效应的各向异性、抗溶胀导电水凝胶用于水下监测 2025-11-07
- 苏大汪晓巧教授、张克勤教授Nano Lett.:仿生超拉伸、结构可编程Janus螺旋水凝胶纤维用于应变不敏感的人体热能收集与传感 2025-02-10
- 东华大学武培怡/孙胜童团队《Adv. Mater.》:首例美学离子皮肤 - 实现应变不敏感触觉感知和纹理识别 2023-03-03
