响应性材料具有自主感知和对各种外部刺激做出反应的固有能力,展示了一定的物理智能。在众多响应性材料中,液晶聚合物(LCPs)以其显著的可逆响应形态变化特性以及在软机器人领域中的潜力而脱颖而出。近期,香港中文大学冯伟、何奇洸助理教授和张立教授共同在Advanced Materials 期刊以 Embedded Physical Intelligence in Liquid Crystalline Polymer Actuators and Robots为题目全面概述了利用液晶聚合物(LCPs)开发具有物理智能的制动器和机器人的最新进展 (10.1002/adma.202312313)。该综述围绕刺激条件展开,根据基本的控制和刺激逻辑进行分类,论述了三个主要类别:对变化刺激作出反应的系统,受恒定刺激驱动的系统以及具备学习和逻辑控制能力的系统。此外,文章还概述了这一充满活力的领域未来需要解决的挑战。

单调响应:利用手动改变的刺激来驱动液晶聚合物(LCPs)进入离散状态的响应性LCPs
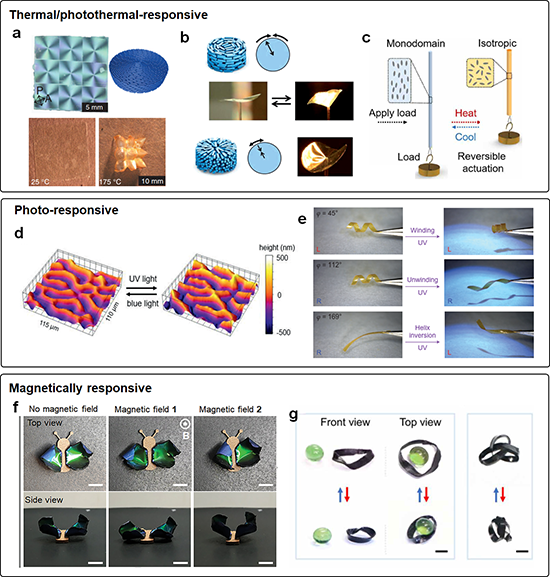

图:电、湿度、力响应性液晶聚合物
第二种响应:在外界刺激作用下系统进行持续震荡或振动
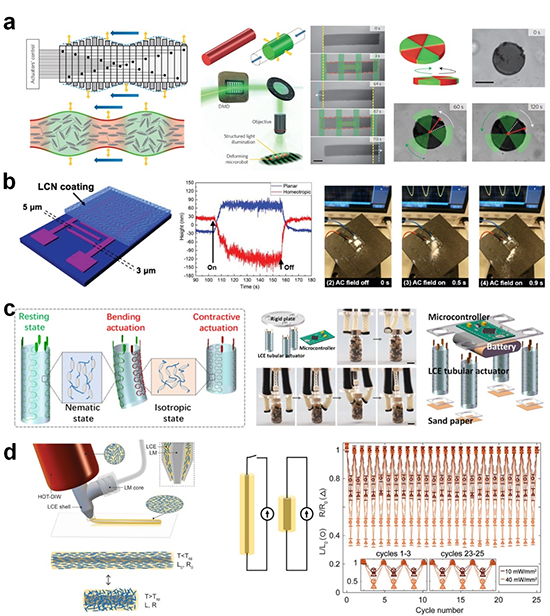
图:利用计算机辅助方法通过改变刺激来控制和驱动液晶聚合物(LCPs)。
第三种驱动方式:在恒定刺激作用下系统进行振动/振荡

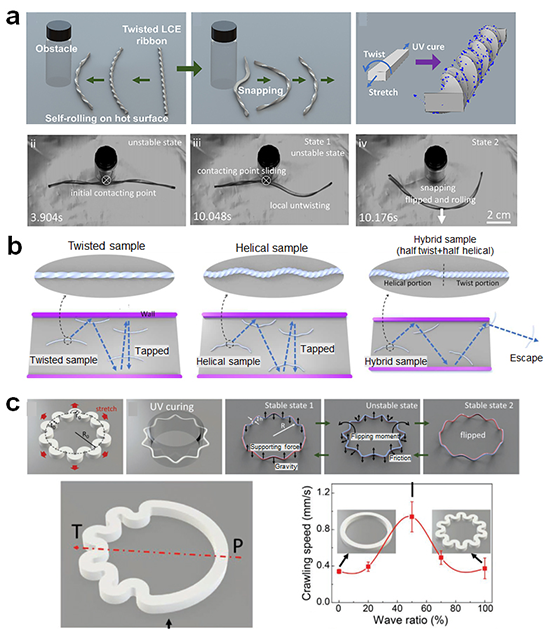
图:在热场中持续振荡的液晶聚合物动器系统
此外,文章还回顾了基于液晶聚合物的交互式机器人集群的研究进展。该综述还阐述了最近基于液晶聚合物的自主学习和记忆的机器人系统。除了对环境刺激的物理适应能力外,学习能力代表了智能的新维度。与依赖数字/虚拟算法的机器学习相比,物理学习的一个关键部分在于材料开发。关于机器人学习和逻辑控制的研究仍处于起步阶段。设计这种系统的一个关键点是向系统中引入“记忆”。这种“记忆”可以通过化学反应滞后(例如偶氮苯异构化)、时间依赖性材料扩散(例如溶剂或其他物质),或聚合物链/网络的拓扑变化编码到材料中。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202312313
作者简介

冯伟,国家级青年人才,洪堡学者,本科和硕士毕业于中国科学技术大学,博士期间从Dirk J. Broer院士和Danqing Liu副教授,并于2020年博士毕业于荷兰埃因霍温理工大学。他曾在北京大学杨槐教授和马普智能系统研究所Metin Sitti教授团队从事博士后研究。目前,他是香港中文大学的香港研资局博士后,致力于研发基于响应性聚合物(包括液晶聚合物)的智能设备。

何奇洸,香港中文大学(CUHK)机械与自动化工程系助理教授。在2023年加入香港中文大学之前,何教授于2015年在清华大学获得学士学位。他在加利福尼亚大学圣地亚哥分校(UCSD)师从蔡胜强教授获得硕士和博士学位。他曾在宾夕法尼亚大学作为博士后研究员,师从Jordan R. Raney教授。他目前的研究重点是软体机器人、致动材料和增材制造。

张立教授是香港中文大学(CUHK)机械与自动化工程系的教授,同时也是CUHK外科系的客座教授。他是中国科学院深圳先进技术研究院(SIAT)与香港中文大学联合机器人与智能系统实验室的港方主任。在2012年加入香港中文大学之前,他曾在Bradly Nelson教授的团队中担任博士后研究员,后来在瑞士联邦理工学院苏黎世分校(ETH Zurich)的机器人与智能系统研究所(IRIS)担任高级科学家和讲师。
- 南京邮电大学赵强/马云/张雨霞团队 Nat. Commun.:实现具有高发光不对称因子的稳定胆甾相液晶聚合物网络 2026-05-23
- 天大浙江研究院“高分子复合材料中心”(宁波)诚聘博士后/特聘青年研究员 2026-03-16
- 中国矿大(北京)王萌/北大杨槐 AFM:提出一种“化学门控氢键”策略 - 实现蓝相液晶聚合物薄膜在湿度响应中的多功能集成 2025-11-12
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 天津科大刘苇教授、侯庆喜教授团队 CEJ:高效多功能的Janus生物纳米复合膜用于可控的高灵敏水下制动器 2023-10-27
