哈工大李天龙、郑大张伟伟《Small》:受变形虫启发的毒液微型机器人
2023-07-03 来源:高分子科技

大自然为单细胞生物应对复杂环境和生存任务演化了一种成功的进化方向——伪足。变形虫是一种单细胞原生动物,通过控制原生质的定向流动,可以再任意方向产生伪足,以执行环境感知、运动、捕食和排泄等生命活动。然而,创建具有伪足的微型机器人系统,以获取变形虫的环境适应和任务作业能力,仍具有很大的挑战。

图 1 机器人的编程策略和应用

图 2 伪足的特征
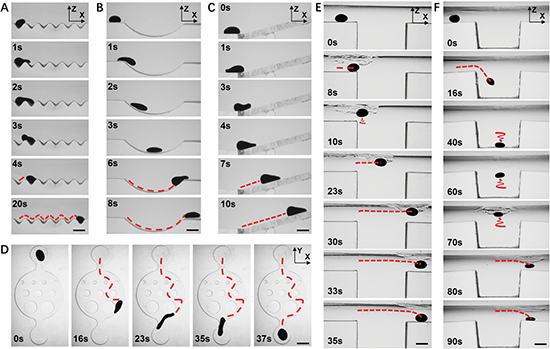
图 3 机器人的运动能力

图 4 机器人的吞噬能力

图 5 机器人的寄生能力和化学应用
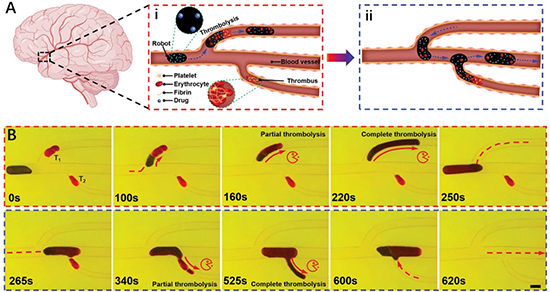
图 6 使用毒液机器人进行药物溶栓
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/smll.202207360
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 西安交大唐敬达课题组《ACS AMI》: 三相态磁驱动微型机器人 2024-01-25
- 港中文张立/哈工大(深圳)金东东团队 Sci. Adv.:用于胆管内靶向细胞递送的模块化微型机器人 2023-12-19
- 斯坦福赵芮可教授《Nat. Commun.》:人体内的体操高手 - 无线两栖送药机器人 2022-06-17
