在生物中,个体执行动作的能力具有较大差异:在反复训练后,肌肉仍能保持“记忆”状态,能够长期维持肌纤维张力和以及强度。另外,即使在中断训练较长时间之后再进行恢复训练,肌肉也能在较短时间内达到之前的激活状态。该现象被称为“肌肉记忆”,这归因于肌肉神经系统独特的学习能力:肌肉神经系统释放不同的神经递质(如Glu,ACh等)促使肌肉终端执行不同的动作(瞬时反射或持久输出)以响应外部刺激。这一过程有助于肌肉执行终端减少对大脑皮层的依赖,并帮助个体即时高效完成相应任务。尽管已有少数课题组模拟了基于单一神经递质传输的人工神经肌肉系统,但在真实环境中,个体的肌肉运动应是瞬时响应与持续输出模式共存,并且能够在两种模式间实现快速切换。为了模拟这种能力,需要设计一种具有多神经递质可切换的人工神经肌肉系统,以应对复杂多变的环境刺激并执行有效反应,例如缩手反射和肌肉记忆。此外,在目前已报道的人工神经肌肉系统中,机械手的肌腱材料通常由电活性聚合物组成,其输出应力小于3 MPa,远低于日常所需的强度。这一局限性决定了目前的人工肌肉系统只能完成一些极为简单的弯曲驱动,却无法与人工骨骼及类似仿生组件级联起来以完成更高级的运动任务,也无法满足复杂神经形态电子的基本要求。相较于电活性聚合物,压电陶瓷和介电弹性体等软体致动材料虽然能够承受更高的应力,但这些材料通常需要极高的工作电压(50~800 V),不利于未来生物集成系统安全。

在生物神经肌肉系统中,传入神经将各种外部刺激转化为神经冲动。神经中枢处理信息,然后通过传出神经将控制指令传输到末端效应器。大脑皮层的高级神经中枢和脊髓的低级神经中枢都以反射的方式调节身体。皮层控制执行条件反应的效应器、脊髓控制执行无条件反射的效应器(图2a)。这两种反应的协调使生物体能够并行地执行多种行动,以应对复杂的环境。作为神经肌肉系统的核心单元,所提出的PCAS由离子凝胶、源漏电极以及基于SiO2衬底的氧化铟锌/聚(甲基丙烯酸甲酯)/2,7-二辛基[1]苯并噻吩并[3,2-b][1]苯并硫吩(IZO/PMMA/C8BTBT)无机-有机杂化薄膜组成(图2b)。通过氯苯蒸汽退火工艺使杂化薄膜实现垂直相分离,利用聚焦离子束(focused ion beam, FIB)技术将薄膜样品的横截面刻蚀成厚度为70 nm的薄片,并通过HRTEM高清扫描验证其垂直分层结构:上层为C8-BTBT薄膜,中间层为PMMA薄膜,下层为IZO薄膜(图2c-h)。

图2.(a)生物神经肌肉系统的示意图,该系统通过传出神经将神经中枢处理单元与运动神经元,能够使多种刺激信号从受体传递到效应器。(b)生物突触和PCAS的示意图,PCAS具有两个独立的通道,用于传输不同的神经递质(即ACh、Glu)。(c-h)PCAS的异质结横截面HRTEM与EDS图像。
两个神经元之间信息的传递依赖于突触间隙,动作电位驱使离子流向突触前膜,并促使前膜释放神经递质通过间隙传输至突触后膜(图3a)。PCAS中的离子凝胶中包含EMIM阳离子与TFSI阴离子,对其施加正负脉冲刺激时,会分别触发双沟道中的IZO沟道中的电子载流子(对应于大脑皮层中的Glu并传递长期命令)与C8BTBT沟道中的空穴载流子(对应于脊髓中的Ach并传递短期命令),形成兴奋性突触后电流(EPSC)。此外,当对PCAS切换施加正负脉冲刺激时,还能够模拟突触前膜释放到突触间隙的两种神经递质的相互竞争关系(图3b,c)。

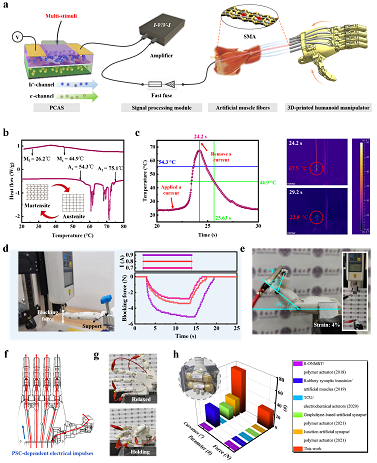
基于人工传出神经构建了一个高强度神经肌肉系统,以模拟对不同外部信息的实时感知和信号处理(图4a):将高强度的钛/镍合金纤维作为人工肌肉嵌入中空部分以控制仿生机械手的运动,信号处理模块将电子或空穴主导的EPSC转换为不同的控制指令传输至仿生机械手,人工肌肉利用形状记忆合金的周期性变形,基于其滞后动力特性,同步感知这些控制指令,继而带动仿生机械手外壳执行高强度负载的致动(图4b,c)。在神经肌肉系统中,当施加小于2 A的安全脉冲电流时,其人工关节的最大曲屈度为73°(对应于最大应变为4%),其最大输出力为29.2 N(图4d,e)。实验演示了通过调节人工肌肉纤维的收缩来抓取一包巧克力的过程(图4f,h)。
基于PCAS独特的载流子传输特性,所提出的人工神经肌肉系统可以在两个独立的通道中同时传递两种神经递质所携带的信息,以控制人工肌肉的收缩。这种能力可以模拟人体对不同环境刺激的多种反应,并进一步实现缩手反射与肌肉记忆。这一结果表明,该研究人工神经肌肉系统有潜力模拟生物肌肉的复杂动作,即:非条件反射与条件反射的快速切换。

该工作开发了一种具有多种反应机制的神经整合肌肉系统。核心突触单元通过切换双沟道中主导载流子的类型(即,电子与空穴)能够模拟两种兴奋性神经递质(即,Glu与ACh)的竞争:电子主导的长程可塑性、空穴主导的短程可塑性以及主导载流子在电子和空穴之间的独特转换。多种行为调节模式支持多声源跟踪、多模式研究的混合策略和高效模式识别。在此基础上,进一步提出了一种整合了人工传出神经的人工神经肌肉系统以模拟人体对不同环境刺激作出的反应,包括非条件反射和条件反射;这是首次在人工突触驱动的人工肌肉系统中同时现实应力与曲屈,并在各项参数方面都远超目前已报道的人工神经肌肉系统。这项工作为下一代人工智能在认知、听觉、记忆和运动神经信息处理方面的提供了指导思路。
团队介绍
该工作是南开大学神经形态与柔性电子实验室近期关于人工神经突触及类脑系统的最新进展之一。徐文涛教授为该团队负责人,现任南开大学杰出教授,博士生导师。获得国家杰青,国家级青年人才,天津市海河英才计划领军人才,天津市杰青等项目资助。曾任韩国浦项工科大学和首尔国立大学研究副教授,在美国四院院士伊利诺大学香槟分校John A Rogers教授研究组和美国两院院士、中科院外籍院士斯坦福大学鲍哲南教授研究组访问学习和合作研究。近年来研究兴趣主要在神经形态电子器件与柔性电子领域,涉及材料、化学、物理、电子、仿生等多学科交叉。近年来主要围绕柔性神经形态电子学领域,在Science, Matter, Science Advances, Nature Communications, Advanced Materials等杂志发表文章,申请专利30余项。
原文链接:https://doi.org/10.1021/acsnano.2c06122
- 宁波大学赵传壮 Macromolecules: 受挫相分离驱动的磷光可塑性水凝胶 2026-02-24
- 美国西北大学黄嘉兴教授:石墨烯可以像“培乐多”黏土一样模塑成任何形状 2019-02-12
- 科学家发明一种新的混合材料 可适应环境多次重构 2015-12-31
