多功能触觉传感器能够感知周围的环境和作用,在可穿戴设备、智能机器人等领域发挥着至关重要的作用。近年来,受人类皮肤的启发,科学家们开发了多种触觉传感器和人造电子皮肤(E-skins),并实现了多种传感器的集成化。然而,大多数现有的触觉传感器是基于单一的传感机制设计的,不能充分感知信息,也就无法对复杂的外界刺激做出准确的反应。集成多个传感器的方法,能够提高感知能力,但通常需要复引入杂的结构设计和制造工艺,并且可能会造成多种刺激感知之间的相互干扰。此外,大多数触觉传感器采用聚合物基材料制作,例如聚二甲基硅氧烷(PDMS)、聚对苯二甲酸乙二醇酯 (PET) 和聚酰亚胺等,这些材料透气性差,穿戴舒适度较低。与聚合物相比,织物具有质量轻、柔软、透气、对人体皮肤友好的特点,是制备可穿戴电子设备的理想材料。
近日,美国凯斯西储大学曹长勇教授团队设计了一种基于织物的多功能触觉传感器,能够实现多功能传感,可以用于个性化医疗健康监测和软机器人控制。该新型触觉传感器包含一个基于摩擦纳米发电机(TENG)的传感层和一个压阻传感层。其中,TENG传感层用来模拟皮肤快速适应(FA)机械感受器的功能,结合机器学习算法,该传感层能够以高精度感知表面纹理和材料类型。压阻传感层用以实现慢适应(SA)机械感受器的功能,具有优异的传感性能:高灵敏度(11.2 kPa-1)、快速响应 (<40 ms)以及良好的工作稳定性 (1500次循环),能够用来识别语音并实时监控生理信号和人体动作。通过两种传感机制的结合,科研团队展示了该多功能传感器可以用于材料硬度识别、探测复杂的机械刺激、和作为可穿戴的人机交互界面控制接口来操控柔性机器人的运动。

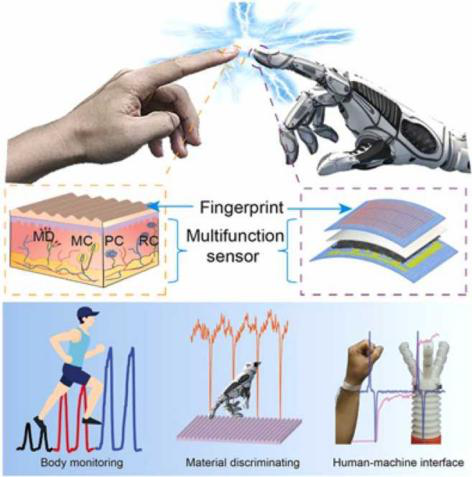
图1. 基于皮肤的多功能织物触觉传感器及其应用。(A)人体皮肤与全织物电子皮肤对比示意图。(B)多功能织物基触觉传感器的结构示意图。(C)摩擦传感层与压阻传感层的输出信号示意图。(D)织物基触觉传感器在健康监测、材料识别和人机交互方面的应用示意图。
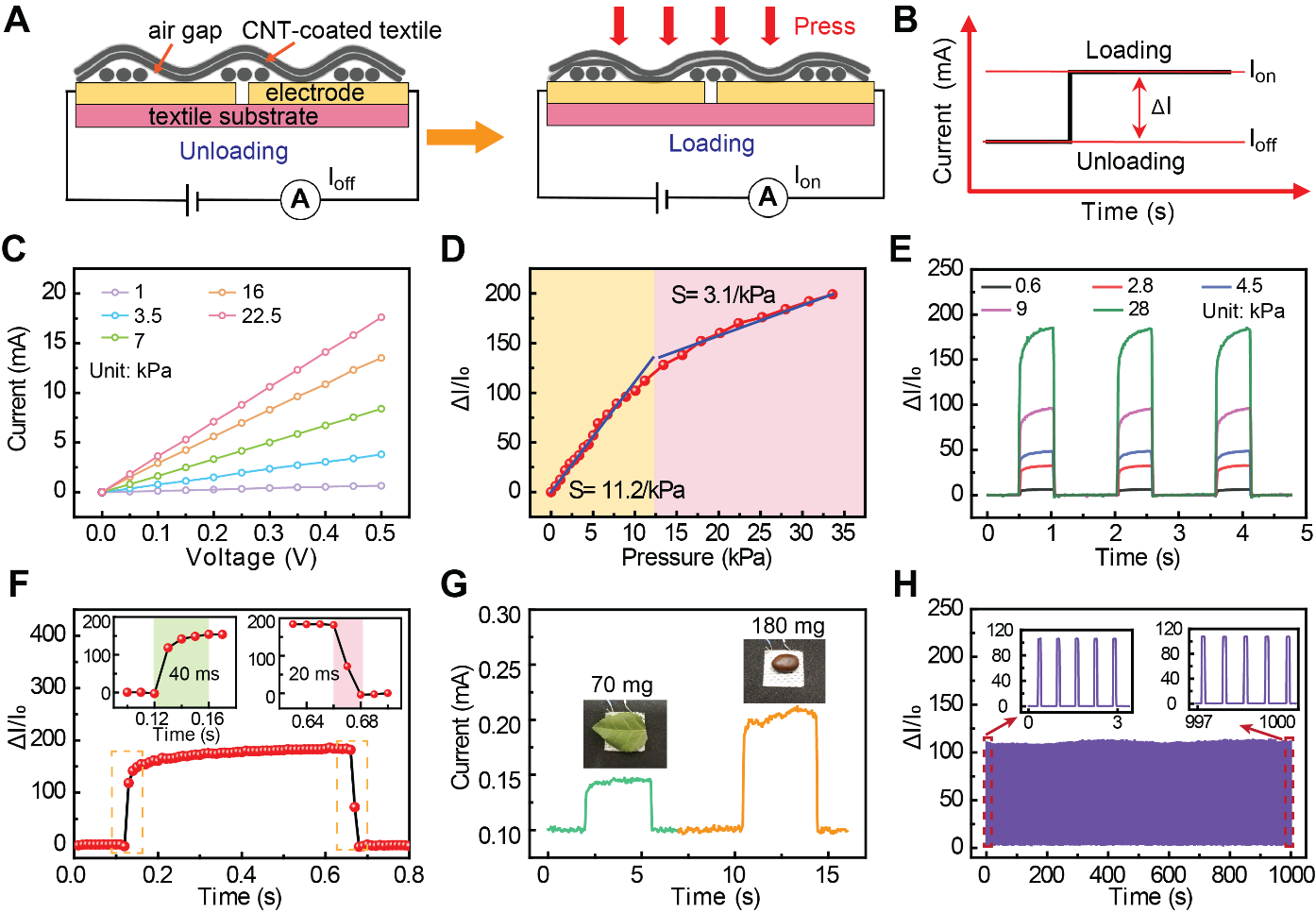
图2. 压阻传感层的传感特性。(A)压阻传感层的传感原理示意图(B)压阻传感层在压力作用下的电流变化示意图。(C)在施加不同压力下,传感器的I-V曲线。(D)压力传感器的压力和电流变化关系。(E)在传感器上施加不同的压力,电流随时间的变化。(F)传感器的响应时间。(G)树叶和种子压在传感器上的照片和电流曲线。(H)传感器的稳定性测试。

图3. 实时的检测人体生理信号和人体运动。(A)人体示意图,蓝色圆点表示检测的位置。(B,C)传感器检测到的人说话时的电流变化。(D)传感器附着在手腕上实时探测脉搏跳动信号。(E)脉搏跳动引起的传感器信号变化。(F-I)人体不同部位在不同弯曲状态下对应的电流信号。

图4. 摩擦电传感层的传感特性以及用于材料表面纹理和材料类型识别。(A)摩擦电传感层的原理示意图。(B)摩擦电传感层的输出电压与压力之间的关系。(C)不同频率下摩擦电传感层的输出电压信号。(D)摩擦电传感层感知材料表面纹理的测试示意图。(E)传感器在不同纹理材料表面滑动的电压信号。(F)图e中电压信号对应的里叶变换光谱。(G)用于材料识别的人工神经网络(ANN)示意图。(H)不同材料的光学照片以及摩擦产生的电压信号用于材料识别训练列表 (I,J)材料分类以及材料预测的混淆矩阵图。
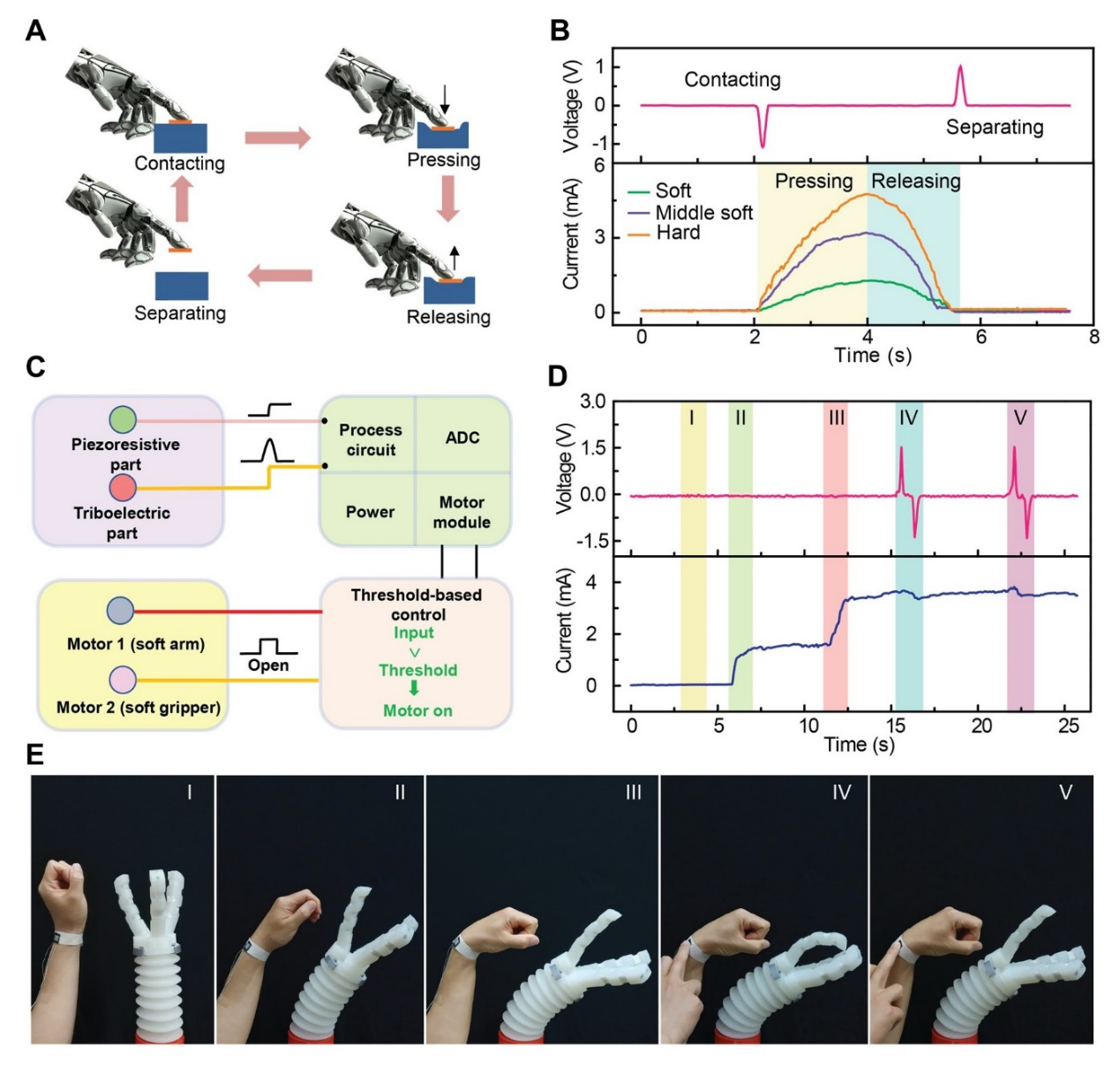
图5. 基于纺织品的触觉传感器应用于复杂的机械刺激的检测和软体机器人的控制。(A)利用传感器检测物体硬度的工作示意图。(B)传感器碰触物体产生的信号。(C)触觉传感器作为人机界面控制软机器人的系统示意图。(D)触觉传感器在五种不同的操作状态下产生的实时信号。(E)由传感器控制的软机械臂和人手臂在不同控制命令下的照片。
该成果发表在国际著名期刊Nano Energy上。论文第一作者为逄尧堃博士(现为青岛大学材料学院教授),通讯作者为美国凯斯西储大学曹长勇教授,佐治亚理工学院王中林院士等为论文共同作者。
论文链接:Yaokun Pang, Xianchen Xu, Shoue Chen, Yuhui Fang, Xiaodong Shi, Yiming Deng, Zhong-Lin Wang, Changyong Cao*, Skin-Inspired Textile-Based Tactile Sensors Enable Multifunctional Sensing of Wearables and Soft Robots, Nano Energy, 2022, 96, 107137.
https://www.sciencedirect.com/science/article/abs/pii/S221128552200218X
课题组网站:www.CaoGroup.org
- 中科院纳米能源所王中林院士和杨亚研究员《Sci. Adv.》:柔性多功能触觉传感器 2020-08-31
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 上海交大张文明教授、同济李汶柏研究员 AFM:具有模态重编程功能的分级可重构软机器人 2024-10-21
- 华南理工大学江赛华教授课题组 Small:可光-热双模式协同作用驱动的意大利面结构软机器人 2023-12-11
- 昆士兰大学Thomas P. Davis、乔瑞瑞团队 NC:3D打印液态金属聚合物复合材料用于近红外光响应的4D打印软机器人 2023-12-04
