
可重构软体机器人就像一种柔软的积木,由各种功能模块组成,可以轻松拆卸并重新安装成任何想要的形式。一方面,它具备可重构机器人可重用性、可互换性和可扩展性的优势,减少了重新设计时间,降低了制造成本,并提高了产品的通用性;另一方面,它也继承了软体机器人柔顺、安全的特性,在应对非结构化环境和处理脆弱的目标物时具备显著优势。现有的大多数模块在设计上都有固定的结构和功能,因此当多个模块组成的机器人需要调整时,唯有通过更换不同的模块才能实现重新配置,这对于中间位置的模块替换以及模块线缆的重新规划是十分不友好的。本研究提出了一种分级可重构的策略。这种策略不仅使机器人具备传统模块化方法的优势,即通过模块间的组合来构建不同的机器人(第一层重构);还能通过重编程模块内的弹性引导元件,来提供模块的多种运动模式(第二层重构)。该设计策略克服了以往模块化软体机器人运动模式不可改变的缺陷,将模块化的设计方法提升到了更高的维度,为机器人调整各种构型和功能提供了更多选择。例如,利用模块间的重新配置,可以构造出蠕虫机器人、全向爬行机器人和软体机械手等应用实例,此外,由多个模块串联而成的软体机械臂也能够通过模块运动模式的重编程,来重新设计运动轨迹和工作空间,而不必进行整个模块的更换。该方法显著降低了模块化软体机器人的操作难度和成本。

图1 分级可重构策略
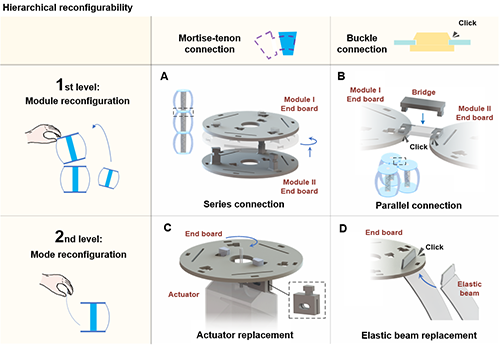
图2 模块及功能单元的连接方式
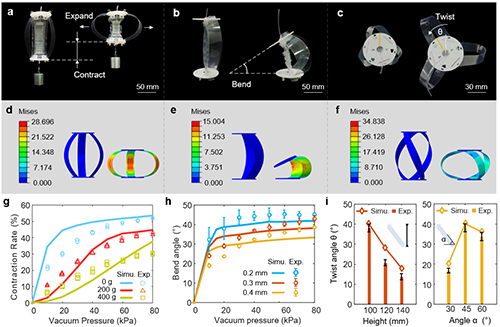
图3 模块多种运动模式的性能

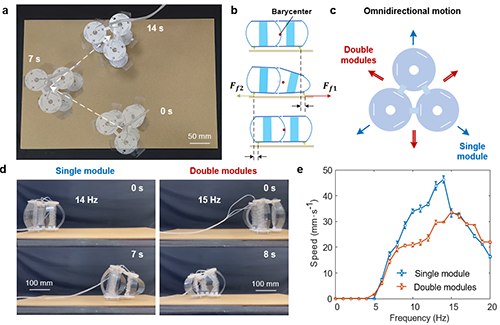
图5 三模块并联的平面全向移动机器人
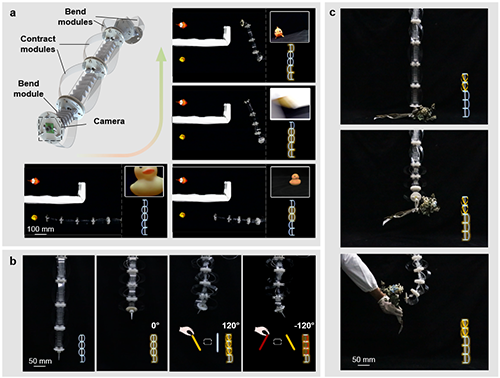
图6 分级可重构的机械臂
原文链接https://onlinelibrary.wiley.com/doi/10.1002/adfm.202414279
作者介绍
通讯作者:张文明,上海交通大学机械与动力工程学院特聘教授,博士生导师,国家杰出青年基金获得者。长期从事微机电系统动力学设计、软体智能感驱系统等方面的研究,先后主持包括国家自然科学基金重点项目在内的30余项科研项目,在Science Advances、Nature Communications、Advanced Materials等期刊上发表学术论文280多篇,授权国家发明专利和软件著作权100多项,出版和参编专著5本。
通讯作者:李汶柏,同济大学航空航天与力学学院特聘研究员,博士生导师。主要从事软驱控技术,仿生机器人动力学设计与控制研究,作为第一作者或通讯作者,相关成果已发表在Nature Communications,Science Advances, Soft Robotics等国际期刊。
第一作者:房付熠,上海交通大学机械与动力工程学院博士生。研究方向为气动软体机器人力学设计和控制研究,相关成果已发表在The Innovation, Advanced Functional Materials, 《中国科学:物理力学天文学》等国内外期刊。
