液晶弹性体(LCE)能在多种外界刺激下进行致动的行为可称作LCE的多模式驱动,相比于单模式驱动,它拥有更多样的致动方式以及更广泛的应用场景。然而,在这种多模式驱动下,每种驱动的模式通常是相互独立的,这限制了驱动器运动的诸多可能性。
近日,来自华南理工大学江赛华教授团队的研究者们制备了一种外形类似意大利面的软体机器人,基于MXene掺杂的LCE实现了不同驱动模式之间的协同作用,其驱动可以通过加热/冷却或利用MXene的光热效应通过近红外光照射来实现,两种驱动模式(热激活和光激活)不仅可以单独工作,也可以协同运作,从而产生更多样、智能的运动,例如实现自主滚动的刹车和转向,或帮助软体机器人更快速地逃离迷宫等。近日,该工作以“Rotini-like MXene@LCE Actuator with Diverse and Programmable Actuation Based on Dual-mode Synergy”为题发表在《Small》杂志上,第一作者为华南理工大学机械与汽车工程学院的硕士生梁梓维,其他共同作者包括金斌杰、赵皓天、何镇华、蒋漳河,文章通讯作者为江赛华教授。该工作得到国家自然科学基金和广东省自然科学基金等支持。
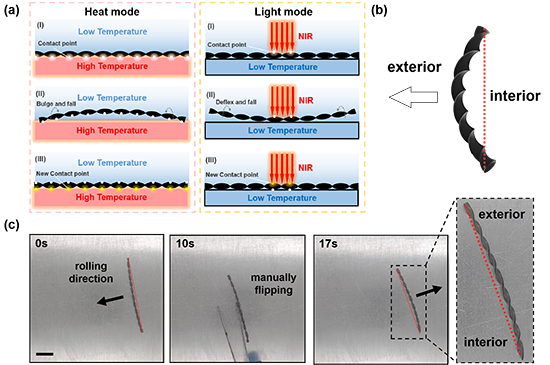
图1 软机器人驱动原理示意图
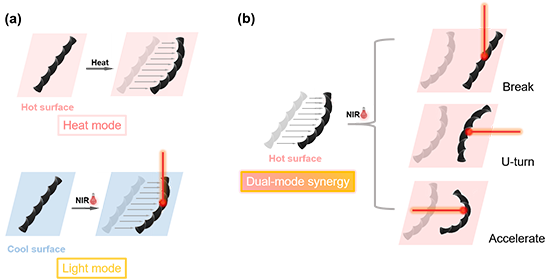

图3 光-热双模式协同作用下机器人的折返与刹车
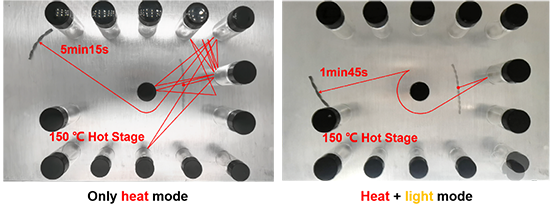
图4 软机器人逃离迷宫对比实验
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/smll.202305371
通讯作者简介
江赛华,华南理工大学机械与汽车工程学院,2014年博士毕业于中国科学技术大学火灾科学国家重点实验室,同年获得香港城市大学联合培养博士学位,曾在2017-2020年间于宾夕法尼亚大学从事博士后研究工作。在软体驱动、智能传感、绿色阻燃等方面从事了多年研究工作。近年来主持国家自然科学基金(2项)、广东省自然科学基金(3项)、科技部国家重点研发计划项目专题(1项)、国家重点研发计划专题(1项)、广州市人才项目“珠江科技新星”、国家重点实验室开放基金等国家/省部级科研项目15项,多次以主要研究骨干身份参与“973”项目与国家重点研发计划项目。目前共发表SCI收录学术论文110篇,其中以第一或通讯作者身份在Nano Energy, Advanced Functional Materials, Chemical Engineering Journal, Journal of Materials Chemistry A, ACS Applied Materials &Interfaces, Journal of Colloid and Interface Science, Composites Part B:Engineering 等国际期刊发表论文54篇,研究论文获得同行积极评价(引用数累计超过4000次,h-index为35。申请国家发明专利33项,授权17项,登记软著1项,省部级科技成果登记1件。)
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 北京印刷学院焦守政/孙志成教授团队 Mater. Horiz.: 具有多场耦合功能的全天候透明MXene基动态除冰膜 2026-07-16
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 北航王广胜/刘明杰/刘利民教授团队 Nat. Commun.:褶皱诱导格子结构MXene/PI薄膜应用于超薄电磁屏蔽领域 2026-01-18
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
