液晶弹性体(LCE)具有可逆驱动行为,拓展了工程设备的功能可设计性,适用于许多应用,包括医疗、能量收集和软机器人等。LCE 驱动的先决条件在于液晶基元排列,可以通过机械拉伸、表面锚定和外场诱导取向来实现。然而,它们的运动复杂性依赖于不灵活、较繁琐的液晶基元排列技术。因此,如何制备取向流程简单、形状复杂度高的液晶弹性体需要进一步研究。
该团队采取了一种数字光固化方法,超快速制造LCE(无模板),并进行复杂的驱动行为的设计。该方法采用商用投影仪进行数字光固化处理(图1b),利用沿厚度方向的光衰减现象形成梯度固化。正面具有最高的交联密度和最低的未反应单体含量,背面则相反。当未反应的单体挥发时,整个厚度方向的区别化脱除程度使得固化后的平面膜转化为三维几何形状(图1c中间略微卷曲的“花”)。同时,液晶基元自发进行取向,最终得到具有复杂三维结构的取向的液晶弹性体,继而能够产生可逆的弯曲变形。
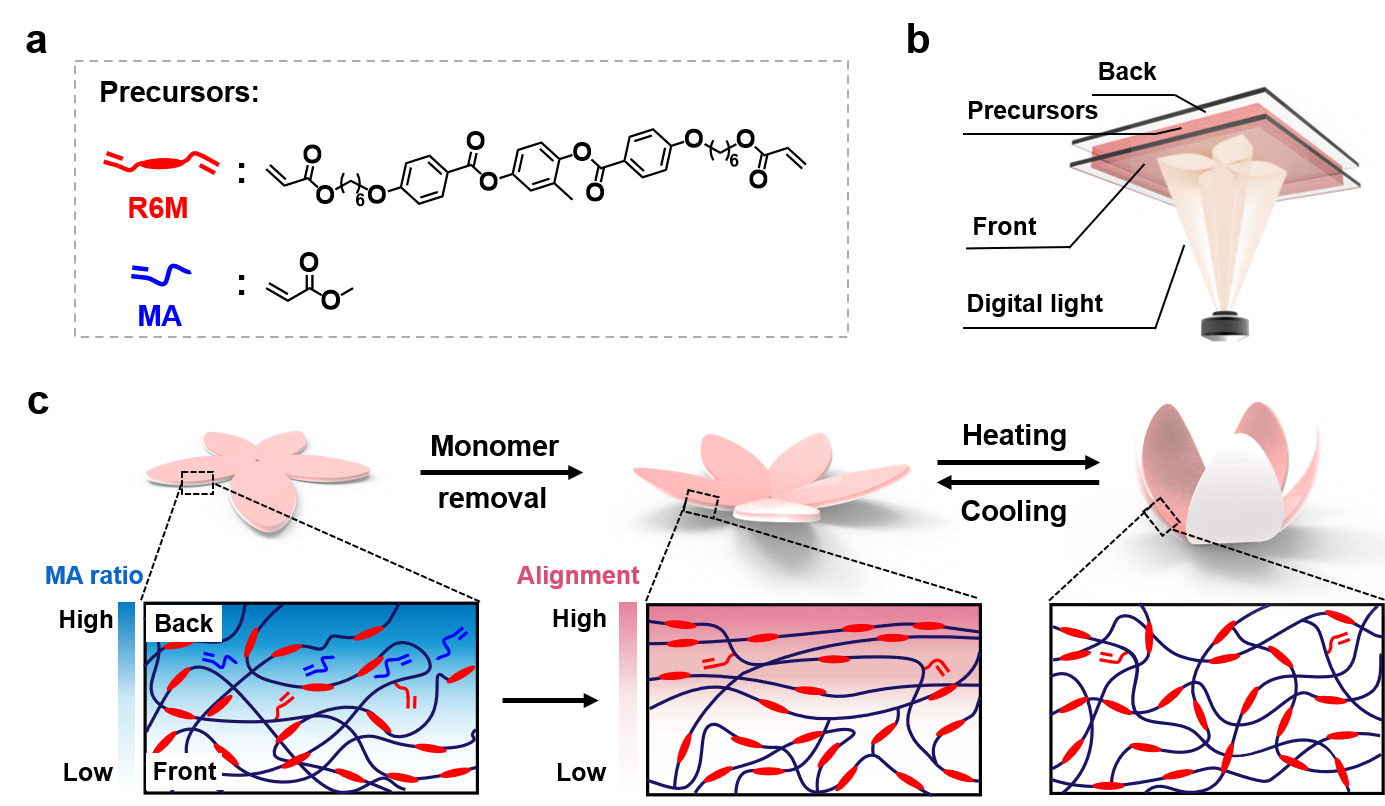
图1 液晶弹性体的数字化制备 (a) 前驱体单体化学结构。(b) 数字光固化示意图。(c) 液晶基元排列和可逆驱动的机理图。
为了设计更稳定的可逆形变行为,利用数字光固化的时空参数可控的特性在同一样品中复合两个曝光时间的方法实现了基础模块的构筑。
借鉴肌肉的运动原理,即通过多个肌肉束的简单收缩/扩张的协同作用来实现不同的运动的机理,利用数字光来自由设计由多个模块(简单弯曲变形)组成并协同作用的LCE模块集成(图2)。

图2 设计模块集成的LCE。图案中的浅蓝色线和深蓝色线分别代表9秒和16秒的曝光时间。所有比例尺均为10 mm。
因此,能够在不使用任何物理模板的情况下,在 25 s光固化时间内快速制造出具有高度可设计性的 LCE,这为设计具有功能多样性的软体机器人提供了一个新的方向。
以上相关成果发表在Advanced Materials(Adv. Mater. 2021, 2105597)上。论文的第一作者为浙江大学化工学院硕士生方梦琦,共同第一作者为浙江大学航空航天学院硕士生刘涛,通讯作者为谢涛教授、贾铮教授与郑宁博士。
论文链接:https://doi.org/10.1002/adma.202105597
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 南科大杨灿辉、葛锜《Nat. Commun.》:具有多模式传感功能的离子电容传感器 2023-08-11
- 兰州化物所王齐华、王廷梅/兰理工张建强 CEJ:首次实现双酚A型氰酸酯的3/4D打印 2021-12-24
- 俄亥俄州立大学赵芮可教授与佐治亚理工学院齐航教授AM:磁性动态高分子材料实现远程模块化熔焊组装与复杂三维结构快速加工 2021-06-21
- 清华危岩教授/北大陈尔强教授/清华吉岩副教授《Adv. Mater.》:可自发长成驱动器的弹性体 2023-01-07
