形状变形软材料,能够响应外界环境刺激(如热,光和磁场等),切换其几何结构与外形,在软体机器人、柔性电子和生物医用等诸多领域有广泛的应用。其中,磁驱软材料,由化学交联弹性体与磁性颗粒组成,具有远程控制、快速可逆形变的能力,在受限与密闭空间(如微创手术)的变形驱动应用引起了广泛关注。加工制备具有复杂形状与磁化分布的磁驱软材料,对于实现按需可编程变形驱动至关重要。传统磁驱软材料,使用模具或者增材制造加工时,材料一旦固化成型,永久形状和磁化分布难以再次改变,进而限制其按需编程变形能力。
近日,俄亥俄州立大学赵芮可教授团队和佐治亚理工学院齐航教授团队,通过将动态交联网络高分子与硬磁颗粒相结合,首次研发出了一种新型磁性动态高分子复合材料,实现远程控制的磁驱软材料模块化熔焊组装、磁化分布重编辑以及复杂三维结构加工和重构,极大提高了磁驱软材料按需可编程变形能力。文章以“Magnetic Dynamic Polymers for Modular Assembling and Reconfigurable Morphing Architectures”为题,在线发表于《Advanced Materials》上。文章的共同第一作者为佐治亚理工学院博士后匡晓博士,俄亥俄州立大学博士生吴帅和博士后迮弃疾博士,共同通讯作者为赵芮可教授和齐航教授。

新型磁性动态高分子材料(Magnetic Dynamic Polymers,MDP),由基于狄尔斯-阿尔德(Diels-Alder)反应的热可逆交联弹性体和微米硬磁颗粒组成。热可逆交联弹性体基体,通过双马来酰亚胺交联带有大量呋喃侧基的柔性预聚物制得。将具有高剩磁和高矫顽力的钕铁硼(NdFeB)硬磁颗粒均匀分散在弹性体基体中,得到具有温度和磁场响应的磁性动态高分子复合材料。由于Diels-Alder反应热可逆特性,材料表现出可逆的弹性-塑性转变:在室温下,材料形成稳定交联网络而表现出优异弹性;在中等温度下,网络动态重排释放内应力而表现出可控的塑性;在高温下,材料交联可逆打开而呈现粘性流动,并在降温后再次恢复交联结构。通过控制温度场和磁场,复合材料内部可发生激响应性的高分子网络刺重排或磁颗粒选择性旋转,从而展示出丰富多功能性,包括磁辅助的模块化组装焊接,磁化分布可反复编程以及复杂结构永久形状重构。而在室温下,该材料依然保持了磁驱软材料远程、快速可逆驱动特性,使得加工的复杂结构能够按需驱动变形。
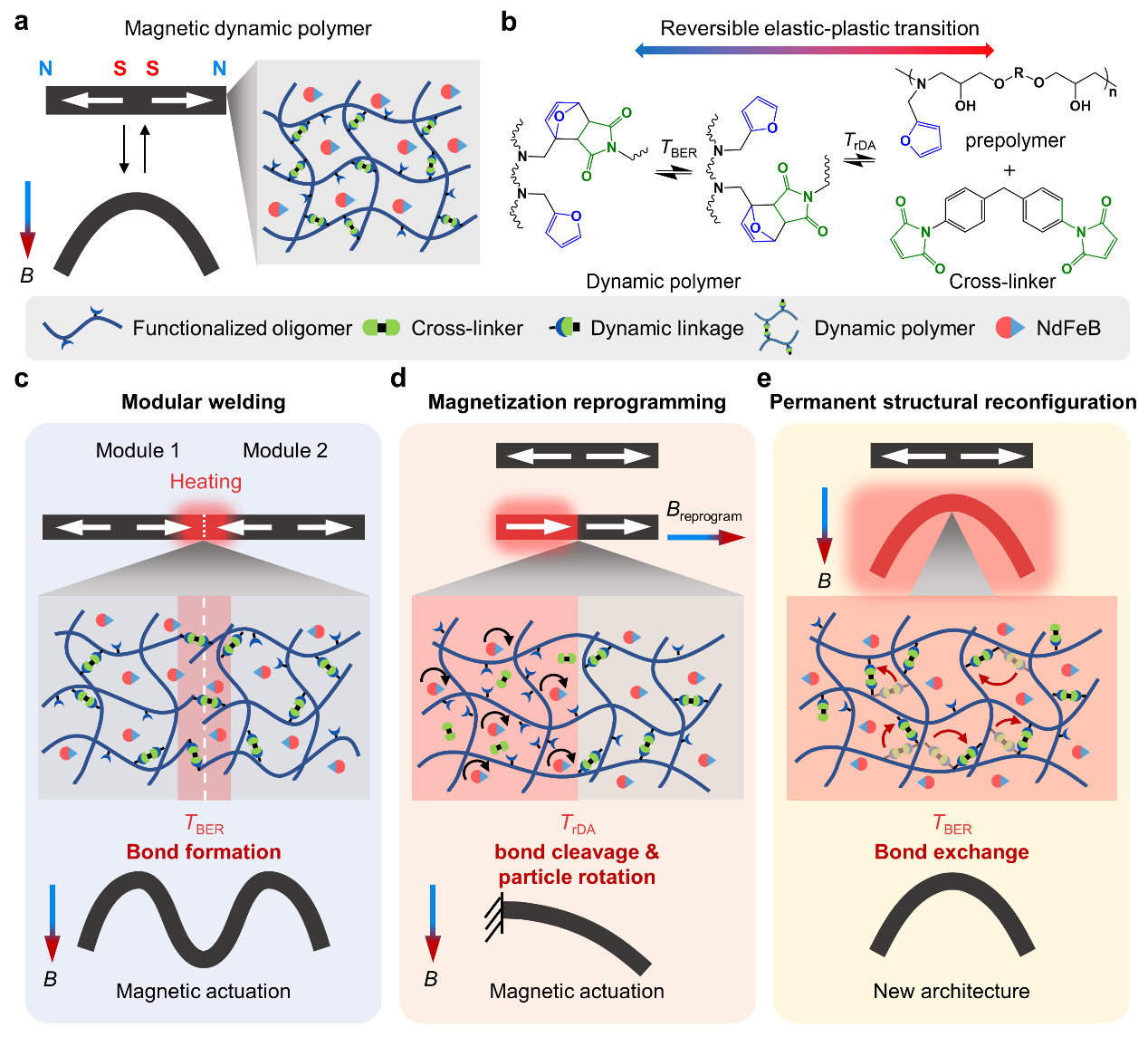
图1:磁性动态高分子复合材料的工作机理与功能示意图
利用磁性“逻辑单元”设计,实现多种结构的磁辅助模块化组装和熔焊。由于磁极之间的相互吸引作用,不同磁化模块在相互靠近时会自发快速组装在一起(<0.3s),再通过直接或红外光照加热,接触面生成新的化学连接而焊接在一起,即使经反复拉伸也不会断裂(图2)。在80℃下处理20min,界面粘接强度可达到材料自身强度的95%。作者提出磁性“逻辑单元”概念,利用两种基本的方形磁化模块(单向磁化与双向磁化)不同方式两两组合,实现了包括扭转、弯曲、扭转-弯曲、同向弯折和垂直弯折的五种逻辑变形模式。利用有限元分析,指导组装体设计,用于复杂二维结构的模块化组装与可控磁驱变形。例如,利用弯曲、同向弯折和弯曲-纽转组合,实现了 “Z”字形组装体磁驱扭转大变形;利用弯曲和弯折,实现了“H”形组装体磁驱顶出变形,以及封闭结构的组装与磁驱起伏变形。

图2:磁性动态高分子复合材料用于磁辅助模块组装焊接与磁驱动

图3:磁性动态高分子复合材料磁化分布原位编程
磁驱软材料磁化分布原位再编程。结合掩模和红外光照加热,硅胶封装的MDP阵列单元被选择性地加热到110-130℃,由于动态交联网络打开与材料粘度降低,加热区域的磁颗粒在小的外磁场下(35mT),发生快速物理旋转。在降温后,新取向的磁颗粒被新形成的动态交联锁定,使得材料保持较高的剩磁(初始值的83%)。多次重复该操作,实现温和条件下复杂磁化分布编程。基于可逆动态化学反应,这种磁化编程可反复进行。借助磁化再编程,实现驱动模式改变。例如,含有4x4 MDP单元器件,初始磁化状态采用沿着列方向交替分布,面外磁场驱动得到“W”形。重构以后的磁化方向沿着对角线指向四个中心点,面外驱动得到具有四个凹痕的结构(图3)。
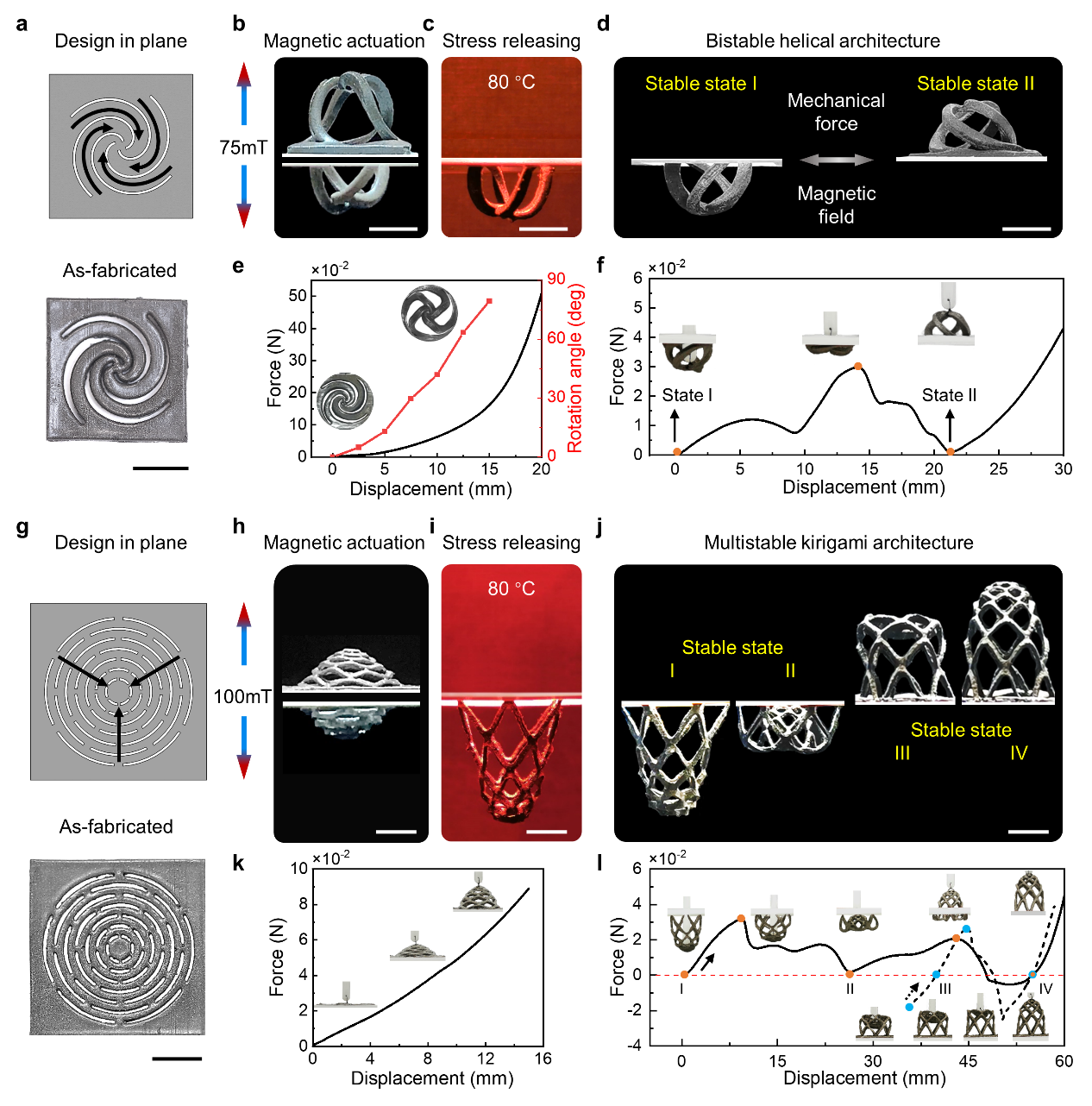
图4:基于磁辅助永久三维形状重构的多稳态结构
首次实现利用重塑二维结构进行复杂三维结构加工。制备的平面剪纸结构,在磁场驱动下通过光照加热,逐渐释放材料内应力,重构成力学多稳态复杂三维结构,且可进一步用于三维与三维结构之间的永久形状改变 (图4)。例如,具有螺旋线切痕和沿着材料指向中心分布的磁化分布平面折纸结构,可变成一个无应力状态的三维立体折纸结构,结构从单稳态转变成双稳态结构,在机械力或磁场下,两个稳态之间可快速切换。同心圆切痕设计的折纸结构,在重构永久结构以后,表现出更加复杂的四重稳态。
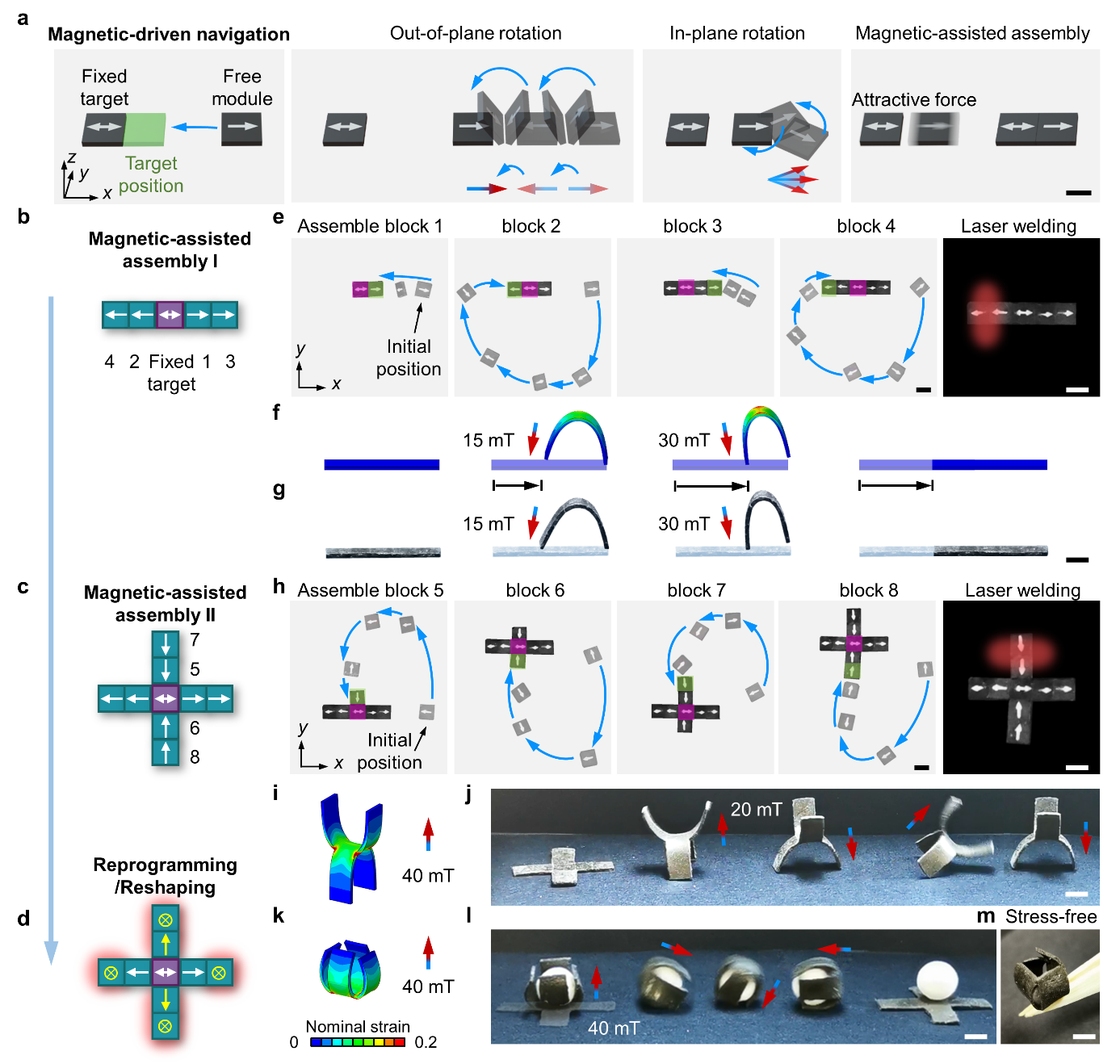
图5:磁力驱动模块的远程导航组装与多功能集成原位重构
通过远程控制模块的导航与组装,并集成形状与磁化的重构功能,实现了磁驱材料的形状与驱动模式的高度定制化与可编程化。利用三维磁场操控模块的翻滚和旋转运动,根据需求远程控制不同模块组装,并利用激光实现远程焊接,得到复杂的磁驱组装结构。对同一结构,进一步重构磁化分布与永久形状,进而改变驱动模式与功能 (图5)。例如,通过固定一个双向磁化模块,远程操控其他的单向磁化模块,组装焊接了十字形组装体。在面外磁场下,组装体产生交替向上或者向下弯曲变形。改变同一个结构的磁化分布后,弯曲变形模式可变成闭合-打开驱动模式。而磁驱的闭合的状态,在加热后释放应力,可得到无应力的闭合结构。
该工作首次提出磁性动态高分子材料,将含有动态化学键的基体与硬磁颗粒相结合,实现具有复杂外形与磁化分布的磁驱软材料加工,与形状与磁化分布的再次改变。这种崭新的磁性动态高分子材料概念,可以扩展到含有不同刺激响应动态高分子材料基体和磁特性颗粒的材料体系。由于动态交联材料自身多功能性,包括材料加工过程可以焊接与重塑,服役过程的可以自修复,使用后可回收加工,这种新概念材料将极大提高变形软材料可编程变形能力,多功能性与可持续性,也为下一代多功能组装体、可编程驱动器与组合机器人与功能材料新型加工提供新的解决方案。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202102113
该工作由俄亥俄州立大学赵芮可教授团队的软智能材料实验室(Soft Intelligent Materials Laboratory)和佐治亚理工学院齐航教授团队的软机敏材料力学和3D打印实验室(Laboratory for Active Materials and Additive Manufacturing)共同完成。该合作团队,近年来通过新型磁驱软材料设计与理论模拟指导结构设计相结合,在磁驱软材料与器件制备、加工与多功能化取得系列进展(ACS Appl. Mater. Interfaces 2020, 13, 12639; Adv Mater 2020, 32, 1906657; Adv. Funct. Mater. 2020, 31, 2005319; Advanced Intelligent Systems 2020, 2, 2000060)。
赵芮可教授的 Soft Intelligent Materials Laboratory 将于今年秋季加入斯坦福大学机械工程系, 届时招收力学或材料背景博士生与高分子材料背景博士后。
