人体皮肤的力学传感系统在人与外界环境进行适应性互动中起着至关重要的作用。在抓取动作中,皮肤触觉感受器感知到的触觉信息经由神经系统传递、分析,可以精准的控制肌肉调节抓取力,以适应不同硬度的物体。人体皮肤的压力感受器兼具高灵敏和宽检测范围,而在人工压力传感器的设计中,虽然可以通过降低响应材料的模量和构建微结构来提高灵敏度,但是往往会降低其检测上限,使得制备出的传感器不能很好的兼具高灵敏及宽检测范围。因此,平衡压力传感器的灵敏度和检测范围是提高其应用环境适用性的重要课题。
近期,山东大学化学与化工学院刘亚庆教授课题组开发了一种基于CaCl2·6H2O(无机盐相变材料)和丙烯酰胺的相变凝胶(PC-gel),通过使用相转变能力实现凝胶模量变化的原理,设计了传感性能可调节的压力传感器,能够在高灵敏度与宽检测范围之间相互切换,以满足不同的应用条件(图1)。

图1. 生物感觉反馈系统和人工触觉反馈系统的示意图。

图2. PC-gel的制备及不同温度下凝胶强度的变化。
CaCl2·6H2O作为传统相变材料,具备室温范围内发生结晶与融化的相转变能力(10-30℃)。因此,由CaCl2·6H2O与丙烯酰胺制备的凝胶表现出温度调节的模量变化的能力,可以在300 KPa与340 MPa之间切换(图2)。并且融化与结晶状态下的模量差异具备很好的重复性和可操控性。

图3. 基于PC-gel压力传感器的压感性能。(a)压力传感器的结构及Mode I(结晶前)、Mode II(结晶后)下的压感原理。(b,c)两种响应模式下,传感器电容随压力的变化曲线以及压力诱导凝胶层形变的情况。(d)在不同压力范围内,Mode I和Mode II模式下传感信号的实时监测。
使用PC-gel作为传感层制备的压力传感器展现出温度调控的传感性能,在不同模式下,压力传感器的灵敏度和检测范围有明显的差异性(图3 a,b)。在Mode I—低模量状态下,PC-gel易变形,内部大量离子在电极表面形成双电层,二者协同作用实现传感器的高灵敏和高信噪比(图3 a,d)。而在Mode II—高模量状态下,PC-gel可压缩性降低,缺乏自由移动的离子,此时上下电极的距离成为传感器电容变化的主导作用,因此可实现传感器的宽检测范围(图3 a,d)。
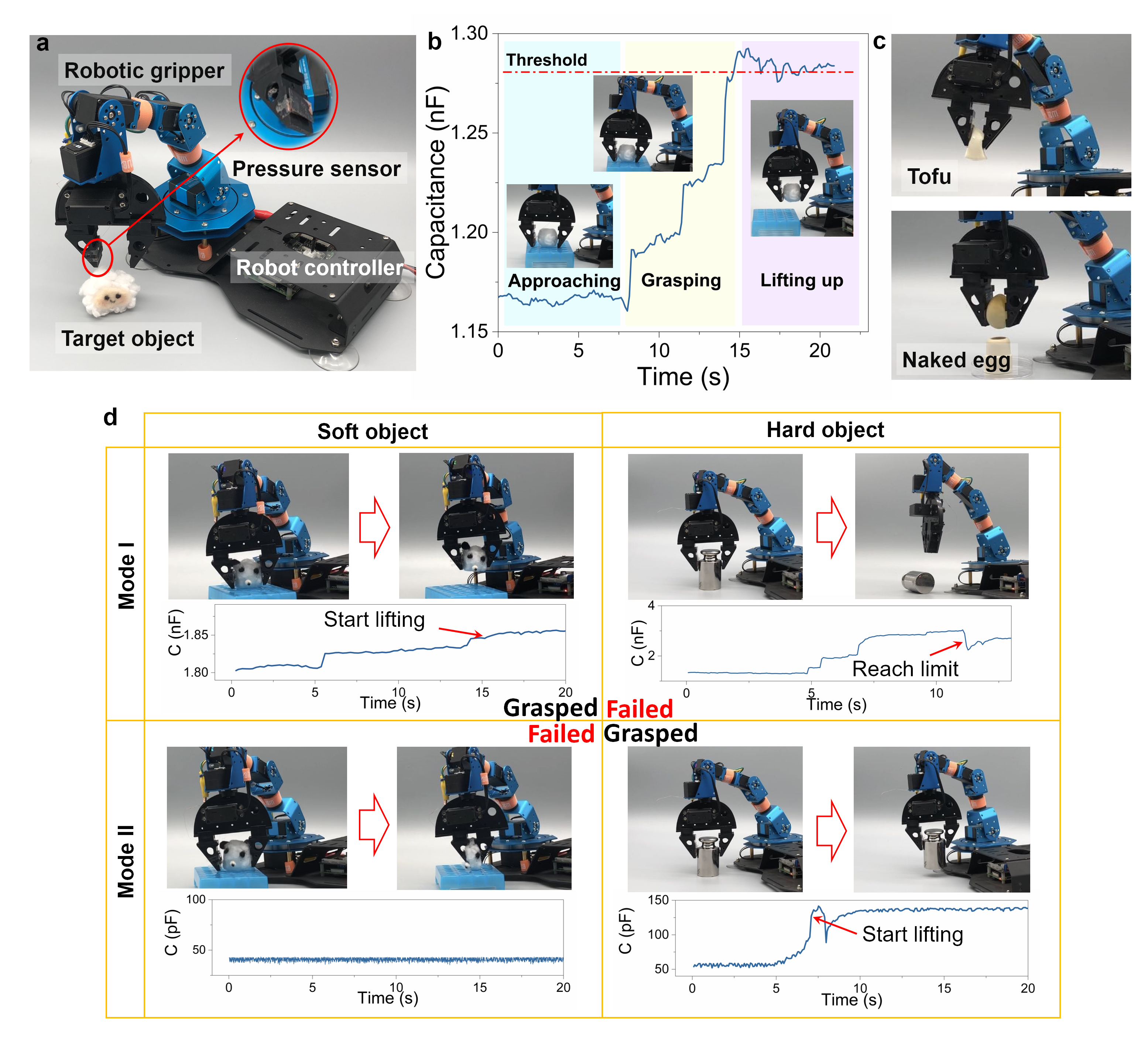
图4. 具备自适应抓取能力的人工触觉反馈系统。(a)人工触觉反馈装置。(b,c)使用Mode I模式抓取棉花、豆腐、去壳生鸡蛋等柔软物体。(d)通过调节两种操作模式分别实现高灵敏和宽检测范围来适应不同材质的抓取物。
将上述压力传感器集成在机械手上,编写程序实时监控压力信号,通过在程序中预设对象材质对应的电容阈值,可以使用压力反馈来控制机械手的抓取力度,实现对目标物体的抓取(图4 a,b)。高灵敏度和宽传感范围两种参数互补的工作模式赋予了该人工触觉反馈系统自适应抓取不同柔软度物体的能力。在Mode I模式下,较高的灵敏性使得机械手能够抓取脆弱、柔软的物体(图4 c,d)。而在Mode II模式下,宽检测范围使得机械手能够抓取坚硬、沉重的物体(图4 d)。与传统的固定工作模式的压力传感器相比,基于PC-gel的压力传感器具有高灵敏度、检测范围广、适应性强等特性,适合作为多用途的传感装置应用于不同的场合。
以上研究成果以“A phase-change gel based pressure sensor with tunable sensitivity for artificial tactile feedback systems”为题发表于J. Mater. Chem. A (DOI:10.1039/D1TA02791C)。论文第一作者为山东大学化学与化工学院科研助理景厚超,通讯作者为山东大学刘亚庆教授。该项研究得到了国家自然科学基金(22002073)、江苏省自然科学基金(BK20200231)和山东省自然科学基金(ZR2020QB064)的资助。
原文链接:https://pubs.rsc.org/en/content/articlelanding/2021/ta/d1ta02791c
- 华工凌子夜、方晓明等Mater. Horiz.封面文章:腌制黄瓜启发的离子渗透策略-打造兼具超高强度与高储热性的刺激响应相变凝胶 2025-08-24
- 四川大学杨伟教授团队《Mater. Horiz.》: 一种相变介导的力学动态转变凝胶 2021-02-07
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 四川大学张传芳教授团队 AFM:高灵敏压力传感器助力自适应机器抓手 2025-12-11
- 北京林业大学杨俊/北京口腔医院白玉兴等 AFM:基于原位凝胶化表皮压力传感器 2025-11-15
