使用抓手对物体进行抓取和操纵是生活、生产和科研中的一项基本任务。自然界中,动物有灵活的爪子,人类有灵巧的双手,可以非常轻松地完成这样的任务,但对机械系统来说却是一大挑战,因为机械抓手要处理的物体尺寸跨度大、形状差异大、数量规模大:从几十英寸的显示屏,到几十微米的电子元器件,这些物体横跨宏观(>1 mm)、介观(100 μm—1 mm)到微观(<100 μm)尺寸;从玻璃片、小钢珠,再到钥匙串,这些物体的形状多种多样;从流水线上分拣的单个物体,到柔性电子器件制备和Micro-LED显示屏组装中成千上万的元件,这些物体的数量规模变化不一,甚至还常常要求先一次性抓取大量元件,再选择性地释放部分元件[1]。
一种很自然的设计是使用多指机械抓手,就像人和动物一样。以往的研究展示了多指抓手用于操纵不同形状物体的优势[2]。然而,这种主动控制的多指抓手机械结构复杂,还需要集成大量的传感器、驱动器[3]。同时,多指机械抓手的控制也异常复杂:首先需要传感器采集力学/视觉信号,在此基础上依靠中央处理器和复杂的算法[4]来确定抓手抓取某个物体的方案(比如说手指要张多开,对物体要施加多大的力,力要施加在什么地方等)。此外,多指机械抓手无法处理薄而脆的物体[2]。当物体小到微观尺寸时,多指机械抓手结构变得非常复杂,很难加工和控制。
另外一种方法是使用吸盘,依靠负压来抓取物体[5]。吸盘式抓手非常适合于几何形状规则、表面光滑的物体,如玻璃、硅片等。但是对于几何形状不规则、表面粗糙或者是小尺寸的物体,吸盘的密封又是一个很大的问题。
自然界中,壁虎等动物可以非常牢固地粘附在物体表面,同时又能很容易地脱开。受此启发,研究者们提出了依靠可控范德瓦尔斯力的干粘附抓手[6,7]。在宏观尺寸下,干粘附抓手非常适合于平面物体的抓取。但将其用于三维物体时,却存在一个内在的矛盾:一方面,抓手要足够软,以适应物体的表面形状,增加抓手与物体的接触面积,增强粘附作用来增大抓取力;另一方面,抓手又要足够硬,以抵御界面脱粘,承受物体的重量。在微观尺寸下,干粘附抓手被成功用于平面物体的组装,特别是用于柔性电子中功能元件的组装[7—9]。但对于非平面结构的元件,由于接触面积不可控,粘附变得不稳定,这种方法不再适用。此外,当元件变得更小时,粘附作用太强,会阻碍元件的释放。
近期他们提出了一种使用形状记忆聚合物(shape memory polymer,SMP)智能塑料作为抓手的全新万能抓手策略[10],如图1所示。该抓手结构非常简单,就是一块形状记忆聚合物块体。可以把它做成不同的大小,用来处理不同尺寸、任意形状、不同数量规模的物体(图2)。
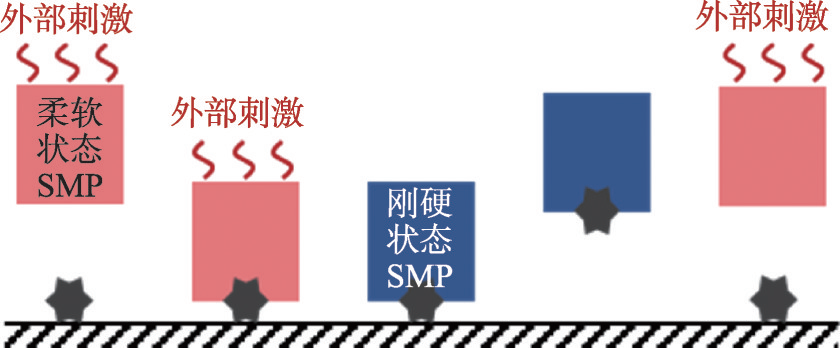
智能塑料形状记忆聚合物,在外部光/热刺激下会变软,可自由变形,此时可以轻松地将物体嵌入其中。之后撤去外部刺激,形状记忆聚合物就会变回刚硬状态,一直保持住该变形的临时形状,将物体锁住,这样就可以把物体抓取起来移动到目的地。当再次对形状记忆聚合物施加外部刺激,形状记忆聚合物就会恢复它最初的形状,从而将物体释放出来。
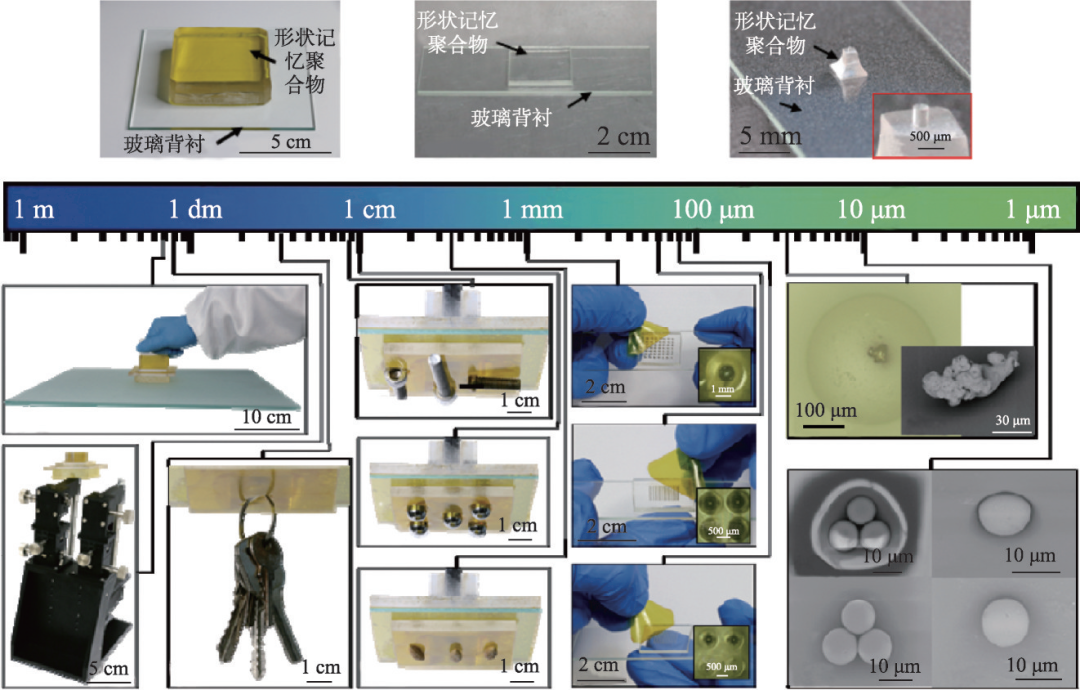
图2 使用形状记忆聚合物万能抓手操纵10 μm到1 m尺寸、任意形状的物体[10]
为了展示该方案的可行性,他们使用一种环氧基的形状记忆聚合物[11](环氧单体 E44,固化剂 Jeffamine D230,质量比为 81∶46)来制备抓手。该形状记忆聚合物在低于45℃时处于刚硬状态,高于45℃时处于柔软状态。实际使用时,加热温度和加热时间取决于抓手的尺寸与加热的方式。比如用于宏观物体抓取的形状记忆聚合物抓手(60 mm×60 mm×5 mm),使用120℃的热板加热到柔软状态需要30 s。而用于微观颗粒操纵的抓手(直径320 μm,高度450 μm),只要用热风枪在120℃下加热不到1s即可。
该抓手能在平面物体表面产生很大的粘附强度。在光滑玻璃(表面粗糙度为 Ra=0.019 μm)上,其粘附强度为 113.9 kPa,和壁虎 100 kPa 的粘附强度可比。即使在粗糙的磨砂玻璃(表面粗糙度 Ra=2.2 μm)上,其粘附强度依然高达 81.7 kPa。如图2所示,他们使用该万能抓手抓取了一块 0.3 m×0.4 m 的粗糙玻璃。
该抓手能在三维物体上产生很大的抓取力。一块 55 mm×55 mm×15 mm 的形状记忆聚合物能在一个外径 10 mm,内径 8 mm 的铁管上产生 171.7 N 的抓取力,是抓手自身重量的330倍,高于最近报道的一个“魔力球”结构轻巧抓手的120倍[12]。图2中展示了使用该抓手抓取重量为 4.16kg 的实验平台。此外,该抓手结构简单,可以非常方便地缩放到不同大小来抓取 10 μm 到 1 m 尺寸之间任意形状、不同数量的物体,如钥匙、螺钉、钢球阵列、螺母阵列、枣核阵列等宏观物体,7×7 的 1 mm 钢球阵列,10×10的 500 μm/300 μm 介观钢球阵列,以及操纵 75 μm 大小的不规则铁颗粒和 10 μm 直径的二氧化硅球。
当物体小到微观尺寸( 100 μm 左右或者更小)时,物体受到的表面力(特别是与抓手的粘附作用)强,会给物体的释放带来较大的挑战。对于三维结构的物体(如图2 中所示的 75 μm 不规则铁颗粒和 10 μm 直径的二氧化硅球),释放后与抓手的接触面积小,粘附的影响较小,依然可以顺利脱粘。但一些平面的物体(如Micro-LED芯片),释放后与抓手接触面积大,粘附作用很强,难以实现释放。
他们提出的万能抓手策略,依靠嵌入锁住的方式抓取物体,不用依靠粘附。因此,当粘附阻碍微观物体释放时,就可以通过表面化学处理或者是增加表面粗糙度的方式来减弱粘附作用的影响,从而保证微观物体的顺利释放。为了展示该应用,他们制备了表面粗糙的形状记忆聚合物万能抓手来进行Micro-LED芯片的组装(图3)。他们将形状记忆聚合物表面变粗糙(图3(a))后,其表面粘附显著降低而抓取力基本不受影响(图3(b)),从而保证LED芯片抓取和释放的可靠性。使用激光局部加热释放 LED 芯片(图3(c)—(e)),就能按照需要,选择性地释放和组装LED芯片(图3(f),(g))。

这种万能抓手策略能大幅度简化抓手的结构与控制,可以非常容易地缩放抓手的大小以处理不同尺寸、任意形状、不同数量规模的物体。特别是在微观情况下,依靠嵌入抓取的方式,摆脱了粘附对微观物体释放的限制,为微观元件的大规模组装提供了新思路。未来还需要在抓手响应速度和对物体材料的适应性方面开展进一步的研究。
参考文献
[1] Huang Y et al. ACS Applied Materials & Interfaces,2016,8(51):35628
[2] Shintake J et al. Advanced Materials,2018,30(29):1707035
[3] Kappassov Z,Corrales J,Perdereau V. Robotics and Autonomous Systems,2015,74:195
[4] Honarpardaz M et al. Robotics and Autonomous Systems,2017,87:104
[5] Mahler J et al. Science Robotics,2019,4(26):eaau4984
[6] Linghu C et al. Soft Matter,2019,15(1):30
[7] Luo H et al. National Science Review,2020,7(2):296
[8] Carlson A P et al. Advanced Materials,2012,24(39):5284
[9] Linghu C et al. npj Flexible Electronics,2018,2(1):26
[10] Linghu C et al. Science Advances,2020,6(7):eaay5120
[11] Zheng N et al. Polymer Chemistry,2015,6(16):3046
[12] Li S G,Stampfli J J,Xu H J et al. A Vacuum-driven Origami“Magic-ball”Soft Gripper. 2019 IEEE International Conference on Robotics and Automation. 20—24 May 2019
原文链接:http://www.wuli.ac.cn/CN/abstract/abstract75997.shtml
