自然界中的许多生物都具有适应环境的能力,能够在特定的外部环境中产生自主的、连续的和有规律的响应。这种生物的自主智能特性启发了研究者去研发能够适应外部环境刺激、产生自主变形运动的柔性智能驱动器以及软体机器人。然而,大多数柔性智能驱动器在恒定不变的外部环境刺激下仅产生不可维持的、无自主性的单次运动。模拟生物体的自主运动特性,设计出在恒定的外部环境刺激下产生自主运动的柔性智能驱动器目前仍然是一个巨大的挑战。
针对这一挑战,合肥工业大学工业与装备技术研究院胡颖研究员在吴玉程教授的领导下,设计了一种能在恒定光照下产生连续自振荡波动运动的柔性碳纳米管/聚合物复合驱动器,并实现了其在光照下的自主趋光爬行运动。该驱动器由具有卷曲结构的水滴形状碳纳米管双层薄膜组成,可以被普通的白光光源所驱动,产生持续的具有波动形式的自振荡变形运动,其运动形式类似于人体仰卧起坐(图1)。这种新型波动振荡运动的产生机制主要来源于光热驱动结合阴影效应所产生的光-机械负反馈、光热响应沿着驱动器长度方向的时间延迟所导致驱动器由右到左的变形滞后,以及驱动器卷曲结构的良好机械弹性。
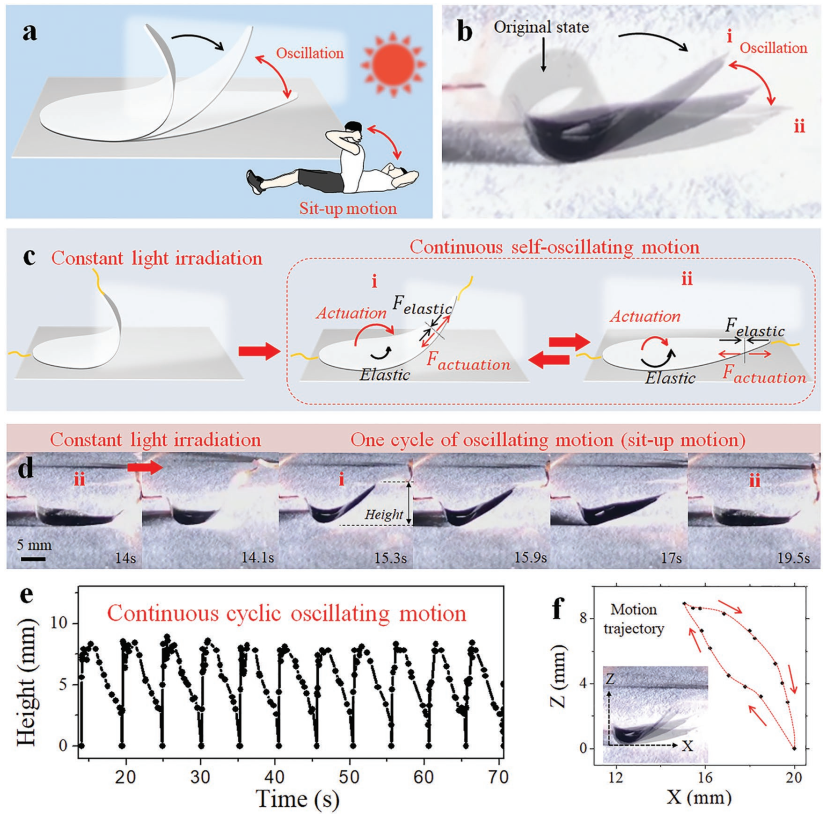
图1. a)水滴状柔性驱动器在恒定光照下产生类似于人体仰卧起坐运动的自主连续变形的示意图。b)恒定光照下自主连续变形的图片。c)驱动器在恒定光照下产生自主连续振动运动的机理示意图。d)柔性驱动器在光照下产生从平躺(ii)到起身(i)然后再返回平躺(ii)的实时变形图片。 e)驱动器在恒定光照下的实时高度变化曲线。 f)驱动器末端在恒定光照下自主变形的运动轨迹图,表明其运动为波动运动。
进一步研究发现,该柔性驱动器对外界光照刺激具有自适应性。当改变光照方向和强度时,其产生的自主变形也相应的发生了改变。当光照从驱动器的侧面入射时,驱动器产生了类似于仰卧起坐与扭转运动相结合的具有新型模式的自主变形运动(图2)。

图2 d–f)当光照从侧面入射时,驱动器产生连续的仰卧起坐运动和扭转运动的示意图、机理图及光学图像。 g)驱动器在持续侧面光照下的自主变形的高度变化。
由于在恒定光照射下呈现出的独特的自主波动运动,该柔性驱动器在软体机器人和能量收集领域具有较大的潜力。例如,设计制备了基于该驱动器的“机器蛇”,在光照下,“机器蛇”能以波动传播的方式自主地、连续地向光源爬行,表现出了飞蛾扑火的趋光运动智能特性。这种持续的趋光爬行运动主要是由周期波动运动与地面的相互作用引起的。(图3)。此外,该“机器蛇”还可以放置在由摩擦电材料组成的基底上,从而构筑了一种新型的光驱动器发电机,通过光照下的连续自振荡运动导致的周期性接触分离与摩擦电效应的结合,实现了在持续光照下的连续电信号输出(图4)。

图3. 恒定光照下的自主向光爬行运动。 a)“机器蛇”向光爬行示意图。 b-c)在恒定光照下驱动器自主向光爬行运动的光学图像与红外热像图。d)自主向光爬行的机理示意图。 e)驱动器随时间变化的爬行位移变化。 f)无导线连接的驱动器的向光爬行运动。g)一端连接有导线的驱动器的向光爬行运动。
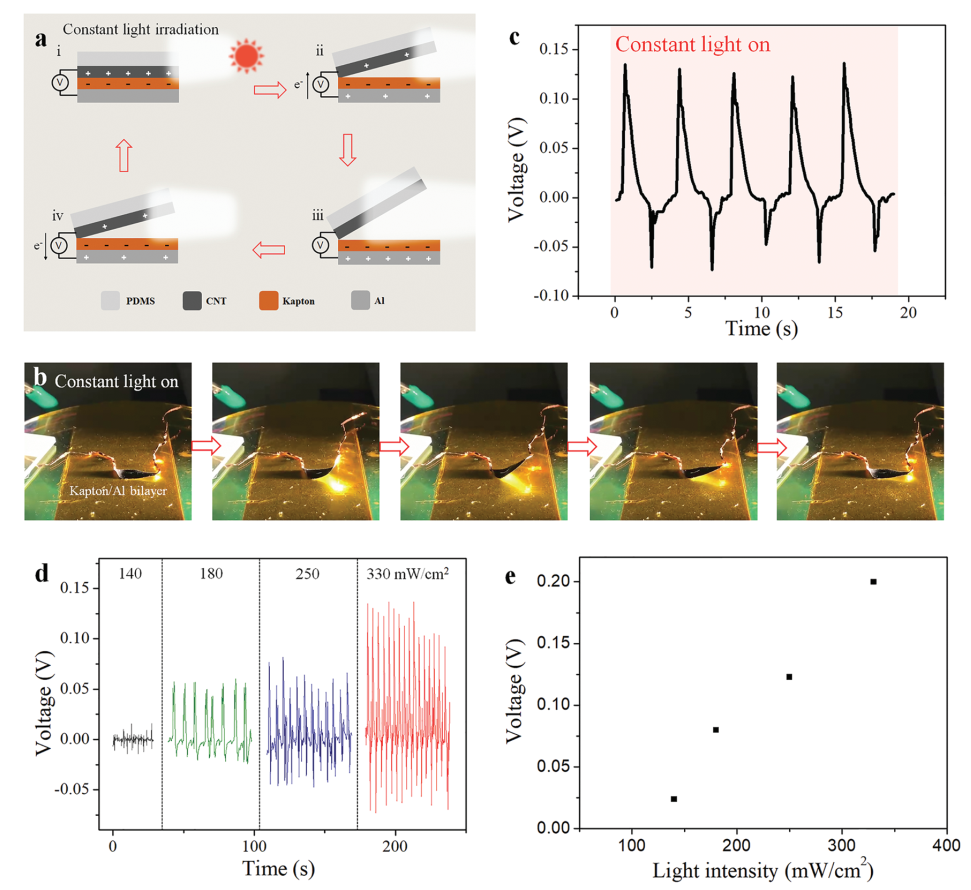
图4. 光驱动发电机的设计和性能表现。 a)光驱动摩擦纳米发电机的工作原理示意图。 b)光驱动发电机在恒定光照下的工作过程的光学图像。 c)持续光照射下光驱动发电机产生的开路电压。 d)发电机在不同强度入射光照射下产生的开路电压。 e)光驱动发电机产生的开路电压幅值与光强度的关系。
以上研究成果以 “An Autonomous Soft Actuator with Light‐Driven Self‐Sustained Wavelike Oscillation for Phototactic Self‐Locomotion and Power Generation”为题作为内封面论文发表在Advanced Functional Materials(Adv. Funct. Mater. 2020, 30, 1908842)上。
论文链接:https://doi.org/10.1002/adfm.201908842
- 坦佩雷大学郭洪爽博士 Adv. Mater.: 无需引发剂 - 卤键液晶弹性体打造光驱动柔性驱动器 2025-05-31
- 北大刘珂团队与合作者 Adv. Mater.:可用于深水驱动的仿生人工肌肉 2024-05-03
- 浙大赵朋/张承谦课题组 Addit. Manuf.:磁场辅助增材制造柔性驱动器 2024-02-06
- 合工大胡颖/哈工大赫晓东、彭庆宇 AFM:能实现向光性变形与自振荡运动的MXene柔性光驱动器 2023-10-24
