软驱动器因其具有环境适应性高、人机交互性强、功能多样等特点,在医疗设备、智能可穿戴设备、等诸多领域有着广阔的应用前景。然而,有几个因素仍制约软驱动器的进一步应用,首先,周期性运动的软驱动器往往受限于复杂的结构设计,例如, 两根对抗式形状记忆合金丝的结构设计,或者结合形状记忆合金,形状记忆聚合物,聚二甲基硅氧烷(PDMS)等多材料的复杂设计。其次,激励这些软驱动器往往需要两路甚至多路的信号。因此如何简化软驱动器的设计是目前亟需解决的问题。
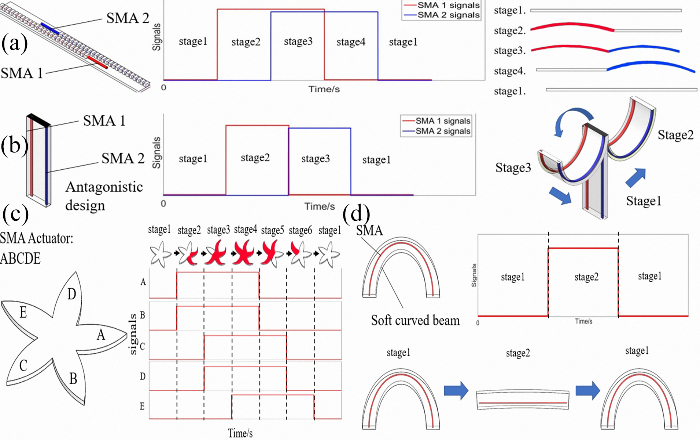
图1 (a) (b) 对抗式形状记忆合金丝的结构设计及其所需激励信号。(c)软驱动器及其所需激励信号。(d)课题组结构设计及其所需激励信号。
为了简化软驱动器的设计,西安交大软机器实验室刘子顺教授课题组提出了一种基于储存应变能的周期性变形机制,并以此设计了硅橡胶基体和形状记忆合金的复合结构。此结构只需要一根形状记忆合金丝与硅胶基体,以及一路激励信号,即可实现软驱动器的周期性变形。具体来说,温度升高时,单向形状记忆合金变形并带动硅胶变形,硅胶储存应变能,温度降低的时候,储存在硅胶中的应变能释放,使得单向形状记忆合金变形,从而完成周期性运动。在此机制中,有两个实现周期性运动的关键,其一是硅橡胶基体临时储存应变能的设计,其二则是硅橡胶与形状记忆合金丝的刚度需要匹配。
为了验证此机制,该团队首先用ABAQUS做了数值模拟,探索可用形状记忆合金丝的刚度和直径范围,然后依据机制制造了一个软驱动器,验证了此软驱动器可以周期性变形,并以周期性变形为基础实现了爬行和抓举。这种机制和此软驱动器为医疗设备、智能可穿戴设备的设计提供了新思路。

图2 爬行展示及其所需激励信号
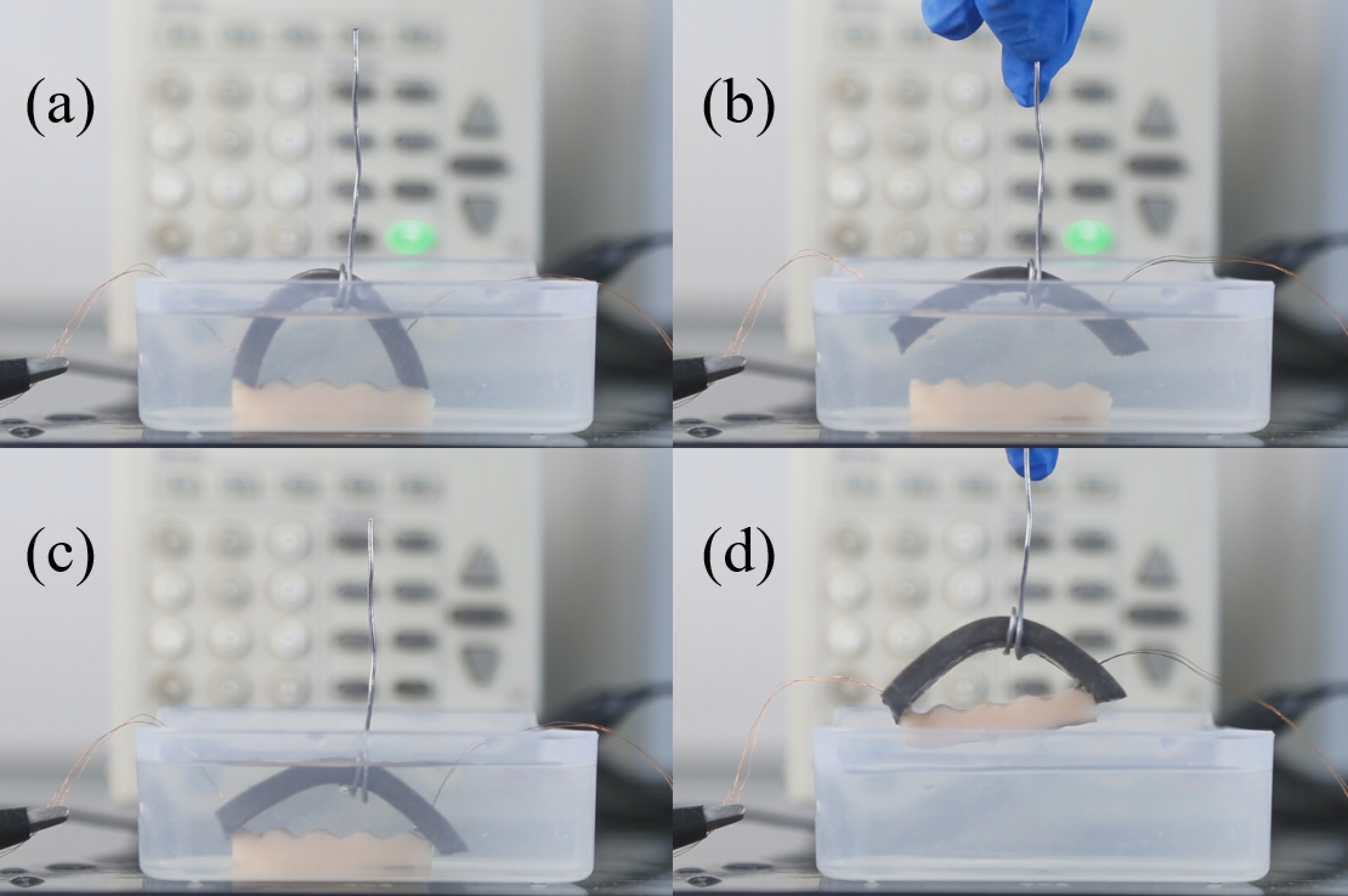
图3抓举展示
以上相关成果分别发表在Advanced Materials Technologies 上。论文的第一作者为西安交通大学航天学院硕士生李征杰,博士生黄蓉,通讯作者为西安交通大学国际应用力学中心主任刘子顺教授。
- 巴黎高科化学学院李敏慧教授 AFM 综述:电刺激响应液晶弹性体作为软驱动器 2025-11-14
- 中国科大龚兴龙教授团队《ACS Nano》:具有可维持塑性变形和可编程磁驱形状恢复的三响应软驱动器 2023-12-05
- 浙江大学赵骞教授团队《Nat. Commun.》:变形模式可编程的高速水凝胶软驱动器 2023-11-26
- 天工大张佳玮教授课题组 AFM:宽温域高阻尼形状记忆高分子水凝胶 2026-05-28
- 苏科大李琳团队/南邮李炳祥团队 Adv. Mater.:具有多重刺激响应性的形状记忆胆甾相液晶弹性体 2026-05-10
- 厦门大学林友辉、华侨大学付莲莲 AFM:从废弃羊毛到角蛋白形状记忆纤维 - 基于分子有序重构的高值化回收 2026-04-14
- 青科大张建明、陈玉伟 ACHM:提出离子液体助推BN电场取向的新策略 - 实现硅橡胶复合材料导热性能提升 2025-12-15
