咬合力能够反映生物体许多功能的健康程度,同时也是一项衡量整个机体正常表现的判断标准,咬合力的测量也对牙科护理及相关研究的发展尤为重要。现存的咬合力传感器大部分是由硬质材料制成,而硬质传感器无法与牙齿不规则的表面相吻合;同时,其表面会引起咬合肌活动的迅速衰减,从而导致最大咬合力测量的失准。因此,材料的力学性能的不匹配将极大程度上降低咬合力测量的准确性。
近日,哈佛大学锁志刚教授和西安交通大学徐明龙教授课题组合作提出了一种应用于动态咬合力测量的柔性传感器。他们通过利用高韧性水凝胶作为离子电极,结合介电弹性体制成电容式结构,首先将传感器放在实际大小的牙列模型中进行全口牙列的咬合测试,建立了电信号与动态咬合力之间的变化关系。相应的,为传感器电信号的精确采集设计了一套高精度的测量系统,并利用该系统表征了传感器在不同速率的阶跃载荷和不同频率的循环载荷下优良的的力学与电学性能。之后,进一步将原本材料更换为生物相容性好的水凝胶和弹性体材料,并对传感器进行了阵列结构的设计,使其能够更易于贴合每个牙齿的形貌,并且同时捕捉到不同牙列区域的咬合力分布状态。该文章展示了柔性传感器在硬质材料不规则表面的高适应性,并且表现出了其在大量动态载荷数据采集中的潜力。
1. 材料选择与传感原理

为了模拟实际咬合时的受载状态,传感器被放置在人体牙列的上颌和下颌模型之间进行测量,如上图中黄色部分所示。柔性传感器主要由两种材料组成:灰色部分为介电弹性体,作为传感器的保护层及中间绝缘层;蓝色部分高韧性离子导电水凝胶。这里首先使用的介电弹性体为VHBTM(3M),力学性能较强,具有一定的粘弹性,但人类实际的咬合速度一般高于材料的应力松弛速度,所以测试中粘弹性的影响可以基本忽略。对于离子导体构成的电极板来说,所使用的高韧性水凝胶能够在裂纹不敏感尺寸内抵抗高度集中的局部应力,这里选择的离子导体是聚丙烯酰胺-海藻酸钙水凝胶,其裂纹不敏感尺寸约为10 cm,远大于人类牙齿的尺寸,这样传感器在咬合过程中所受的较高集中应力不会使水凝胶发生断裂。两层水凝胶(蓝色层)被封装在多层弹性体(灰色层)中间以防它们内部的水分蒸发。介电保护层外附着有离型膜(红色薄层),覆盖在电容结构的上下表面来保护传感器不受到外界的损伤。纯银导线作为连接离子导体和测量系统的界面导体材料,具有相对稳定的电化学性质并且不易被水凝胶中的离子腐蚀。整个电容结构被放在材料测试机上进行压缩形变测试。当外力使传感器结构发生变形时,整体厚度将减小,而绝缘层厚度的减小使得传感器的电容上升,因此在整个变形过程中测试系统可以采集到相应的电信号变化。
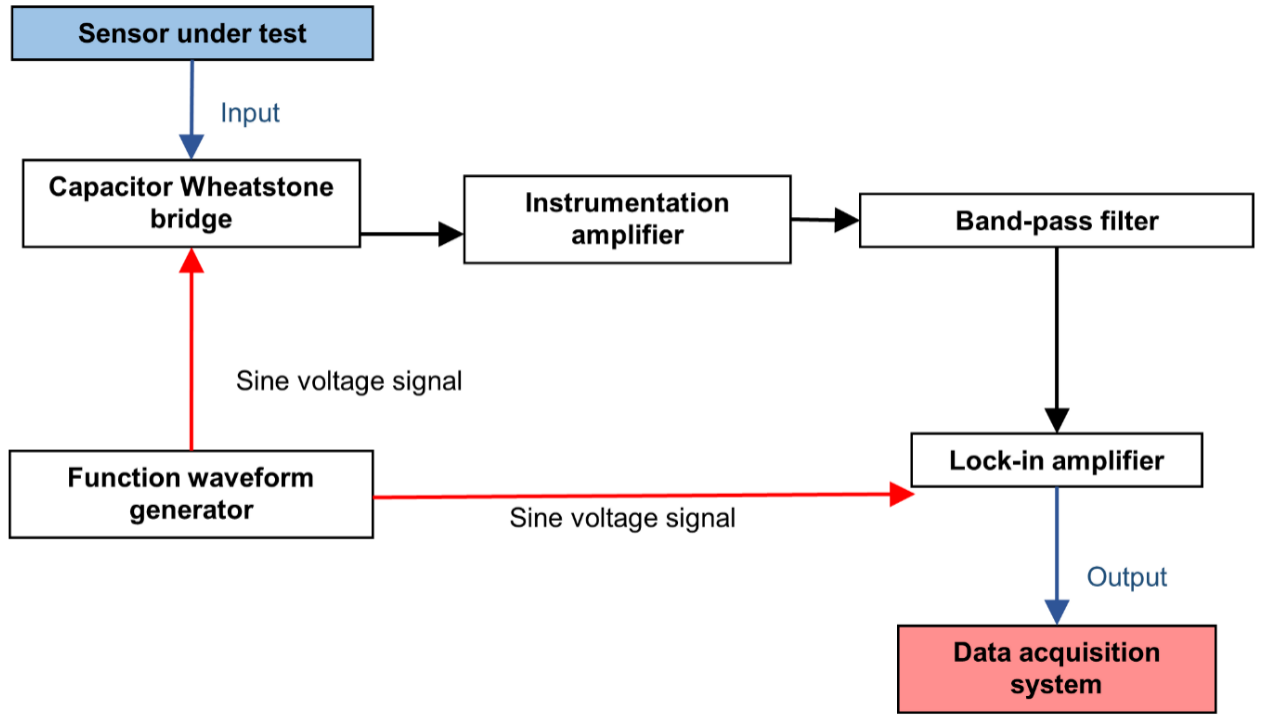
为了精确的捕捉传感器电容的微小变化,研究人员进一步设计了高精度的测试系统,其示意图如上图所示。系统的主体由五部分组成:惠斯通电容电桥、仪器放大器、带通滤波器、函数信号发生器以及锁相放大器。首先,将待测传感器放在电容桥路中进行测试,用来减少环境因素带来的干扰;之后,用仪器放大器扩大来自传感器微小的信号变化。为了增加测量的准确性,进一步排除环境噪声,此处使用函数波形发生器同时向电容桥路和锁相放大器提供相同频率的正弦测试信号和参考信号,并对两组输出信号进行差分计算。两组信号通过锁相放大器的两个通道输入后通过信号差分便能够很大程度上减少噪声,信噪比也能够相对提高。最终利用数据采集系统接收高频信号,将传感器在变形过程中的电容变化完整的采集到。
2. 准静态压缩性能表征
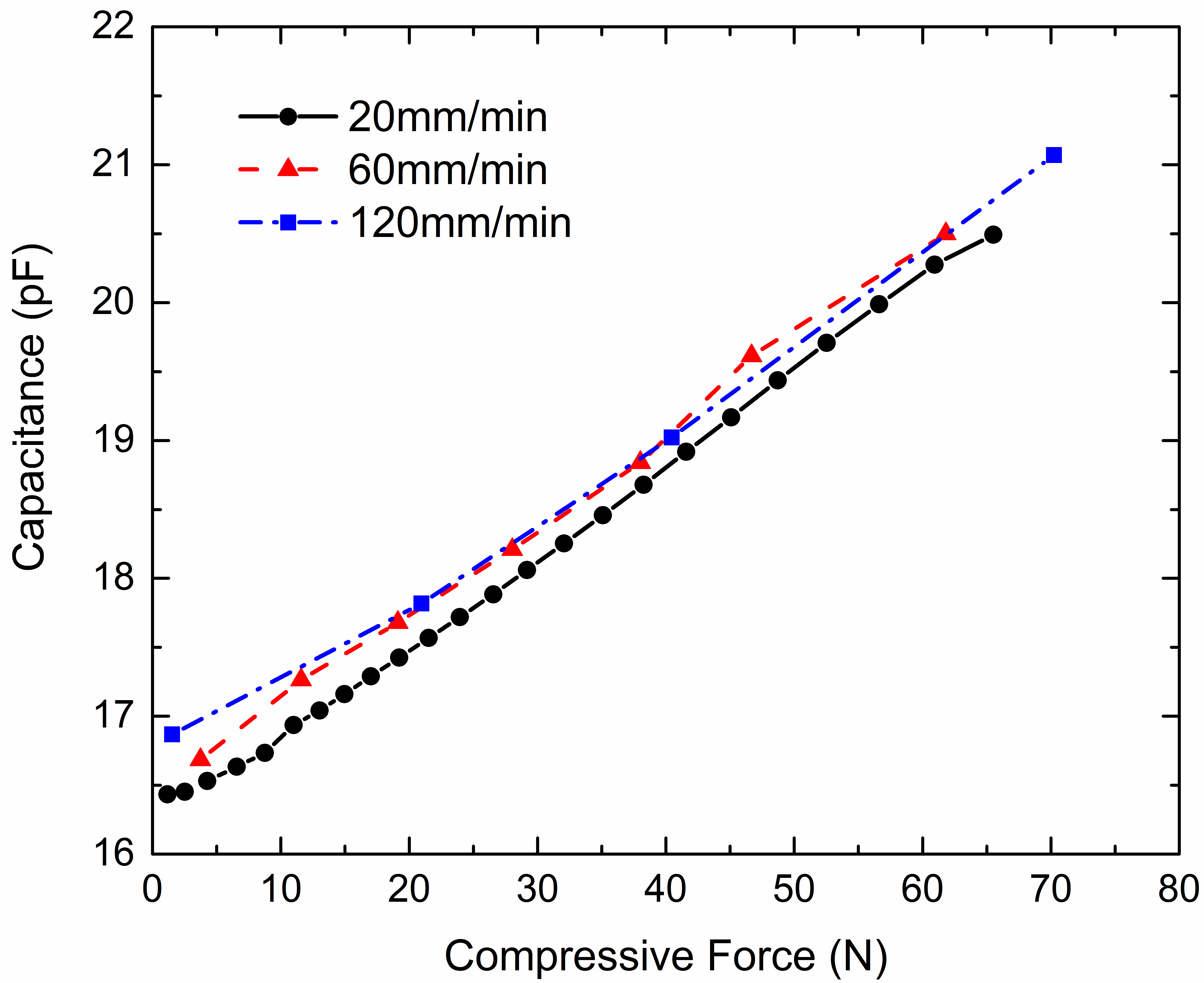
为了标定载荷与测量电压的变化关系,研究人员首先通过对传感器进行不同速度的均匀加载实验测量电容在变形过程中的变化。为了验证传感器结构的可行性,先使用了阻抗分析仪作为测量系统,记录传感器在加载过程中的电容变化,分别在20、60、120 mm/min的位移加载速度下进行了均匀压缩测试,根据人体平均的咬合幅度,将最大压缩位移均设置为3 cm。如上图所示,测试所得电容与压缩力的关系均呈线性关系,并且不同速度下的测试结果基本一致,证明了传感器性能的速率无关性。

然而,对于该阻抗分析仪来说,其采样频率只能到达1 Hz,并不能适用于动态加载中的电容变化测量。为了表征传感器在高速及高频下的性能,需要改用高精度的电容桥路测试系统,该系统的采样频率能够达到2.4 kHz,输出信号为电压形式。此处将阻抗分析仪的采集到的电容信号与测试系统的电压信号进行了对比,绘制了电信号—压缩载荷的关系曲线,如上图所示,电容与电压的相对变化与载荷均为线性相关,线性度较高,证明了电容式传感器和测试系统的可行性。
3. 动态性能表征
在对传感器进行准静态测试标定验证之后,研究人员进一步对其进行阶跃加载的测试,以表征传感器在瞬态载荷下的响应性能。如下图所示,测试设置了三个不同的位移阶跃速度,a、b、c图分别对应20、60、120 mm/min,每个速度下分为7次阶跃加载,每次阶跃的位移为0.5 cm,总位移为3.5 cm,位移阶跃之间有10秒的位移维持阶段。从图中可以看出电压的相对变化与加载的过程基本同步,并且在位移维持阶段电压仍旧保持稳定。

当人们的上颌与下颌进行食物咀嚼时,牙齿处于循环载荷状态,因此本实验中也对传感器施加了线性循环载荷,通过动态测试表征来模拟咀嚼的过程。为了尽量降低粘弹性对表征结果的影响,测试中需要对传感器进行一定的预压缩,利用初始应力来平衡加/卸载过程中部分松弛的应力。这里的预压缩量为2.5 cm,并将循环位移载荷的幅值设定为1 cm,实验结果如下图所示。图中红色数据点为循环测试中10 s内的电压相对变化,蓝色曲线为载荷随时间的变化进程,传感器分别在0.8、1.2和1.5 Hz三个频率下的进行了循环载荷测试,此处循环载荷的频率设定参考了人类咀嚼时的平均频率。可以看出,在各个频率下,电压与载荷循环进程没有明显的延迟现象,并且在加载过程中始终保持线性相关。
4. 材料改进与阵列设计
为了提高大变形传感器的生物相容性,同时降低材料的粘弹性带来的影响,在以上实验结果的基础上,研究人员将水凝胶电极和介电弹性体材料均进行了更换。此处使用了全透明的聚二甲基硅氧烷(PDMS)作为绝缘层和保护层材料,降低了之前弹性体的表面粘性和粘弹性对测试结果的影响;离子导体使用聚乙烯醇(PVA)水凝胶,该水凝胶是一种已经被广泛应用于伤口敷料的生物相容性材料。为了保证传感器材料的柔软性和韧性,这里选择了质量分数为10%的PVA水凝胶作为电极材料,更换材料后制成的全口牙列传感器的实物图如下图所示,其结构与之前相同,形状与大小均参考了牙列模型的外形进行设计,图中的透明框架部分为PDMS,封装在其中的白色电极部分为水凝胶层。

为了验证更换材料后传感器的可行性,研究人员先对该全口牙列传感器进行了准静态的均匀压缩测试,最大压缩位移为2.5 cm。测试结果如下图所示,电压相对变化与载荷的数据仍为线性相关,同样可以看到传感器的载荷感应范围增加到了500 N左右,达到了成人的正常咬合力范围,可见可以通过改变传感器材料的力学属性,来改变传感器的测量范围,从而将其应用于各种动物的咬合力测量。

为了进一步测量牙列不同区域的咬合力分布情况,研究人员将传感器设计为阵列结构来测量三个区域的响应,分别为门牙区、前磨牙区和磨牙区。具体的传感阵列三维示意图如下图所示,仍是由相对电极板和介电弹性体组成的电容结构。上中下淡灰色透明部分为PDMS弹性体材料,而上层的水凝胶电极分为绿色、黄色和红色三个区域,分别对应测量磨牙区、前磨牙区和门牙区的咬合力,每个区域面积占整体电极面积的15%;下层蓝色部分为完整的水凝胶电极板。测量时,下层保持单个导线接出,上层五个电极区域分别用导线接出,这样便可从测量系统中得到各个区域的电压变化。

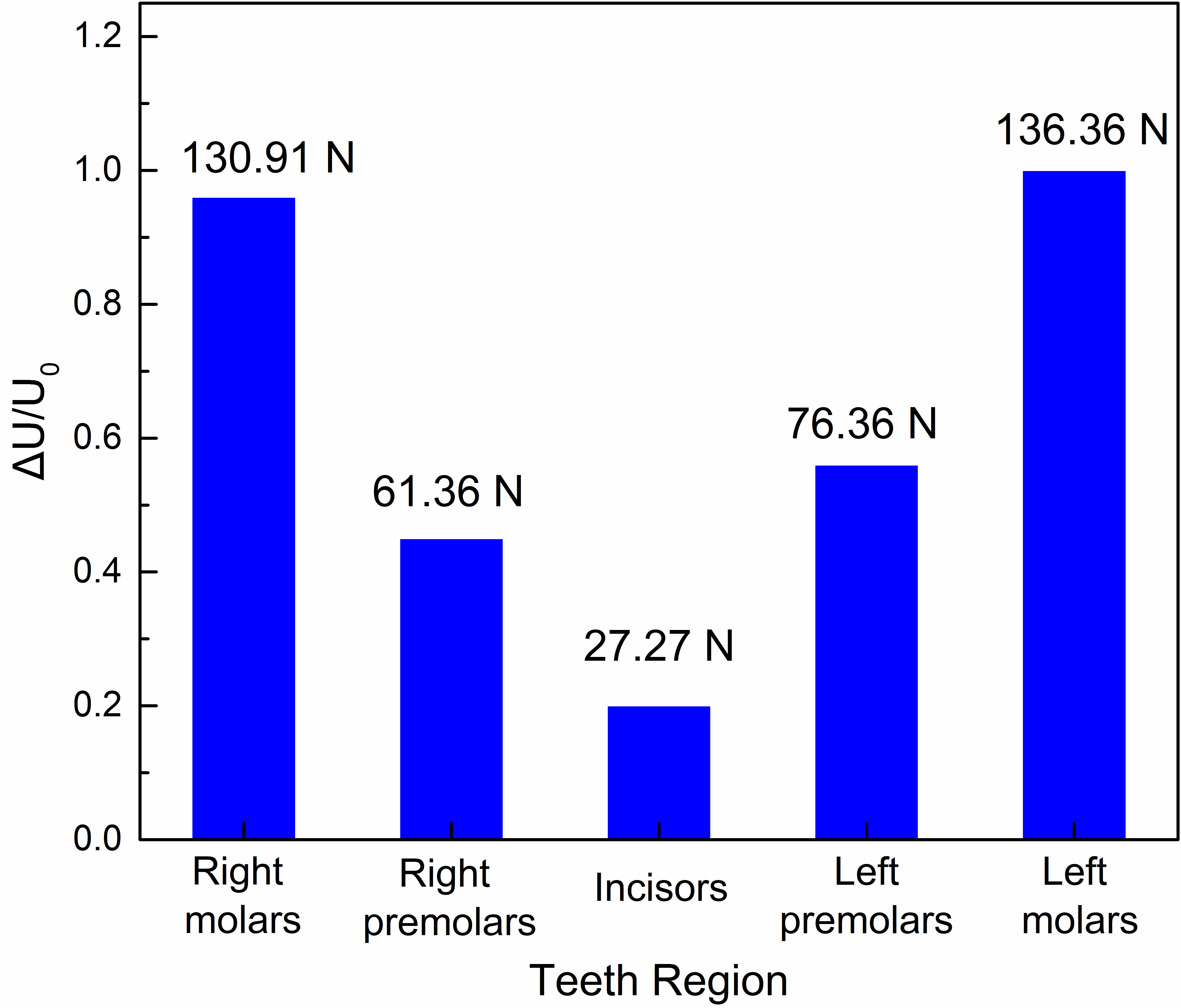
研究人员对该阵列式传感器进行了均匀压缩测试,在最大压缩位移2.5 cm下不同区域的电压相对变化结果如下图所示,柱状图中各个蓝色柱的高度代表该区域的电压相对变化,利用前面所得的电压与受力的关系式可将各区域对应的电压相对变化值转换为所受压缩力大小。由于磨牙区域的接触面积最大,该区域的受力也就相对较大,导致该区域的电压变化较为明显,前磨牙区和门牙区的面积依次减小,使得对应区域的受力依次降低。该结果符合实验的预测以及相关研究结果。由于更换材料后的弹性体粘弹性较小,传感器收到压缩载荷后的应力松弛现象将变弱,因此该生物相容性传感器在动态载荷下的响应会优于原始传感器的动态响应。
综上所述,本工作结合水凝胶及弹性体材料提出了一种柔性的咬合力传感器,能够实现各个牙齿不规则表面的贴合,并且同时捕捉各区域的咬合力分布状态,为人类及动物的牙科学研究提供信号采集的手段。相信本工作能够拓宽以水凝胶为主的柔性传感器的应用,并进一步发挥它的高度柔顺性能,在不规则物体的动态响应中实现信号的准确采集。
这一研究工作最近发表于Extreme Mechanics Letters。论文的第一作者为程思博,西安交通大学博士研究生;共同作者还包括:陈宝鸿,哈佛大学工学院在读博士生;周媛,西安交通大学硕士毕业生。西安交通大学徐明龙教授,美国科学院院士、美国工程院院士、哈佛大学锁志刚教授为共同通讯作者。
论文信息及连接:https://www.sciencedirect.com/science/article/pii/S2352431619302603
- 给水凝胶做“瑜伽”拉伸5次,透明又抗压,成果登上 Science Advances 2026-06-16
- 厦门大学林友辉/南洋理工大学吴荣辉团队 Nat. Commun.:逐层剪切致密化实现块体水凝胶多尺度层级排列 2026-06-17
- 加州理工学院高伟课题组 Nat. Mater.:分子级整合弹性体-水凝胶双相材料 - 构建兼具组织粘附与多功能集成的新型生物电子平台 2026-06-12
- 郑州大学申长雨、刘春太团队 AFM:多模态柔性传感器实现触觉与生物电感知集成 - 推动人机交互新发展 2026-04-24
- 南京林业大学杨蕊副教授 Carbohyd. Polym.:木基高强度粘附性导电水凝胶用于柔性传感器 2025-09-28
- 南方科技大学郭传飞教授团队 Matter:柔性传感器界面再突破 - 超细微柱赋能强韧粘接与高灵敏感知 2025-07-01
