1990-2017年中国居民疾病谱显示,中风 (stroke)已经成为国人死亡的头号诱因,中风在美国也是致残的头号疾病。动脉阻塞引起的缺血性中风约占总数的 85%,作为威胁人类健康的重要杀手,亟待及时有效的治疗手段。
今天,MIT赵选贺团队在Science Robotics (4, eaax7329, 2019)发表论文,首创磁控软体导丝机器人,有望帮助医生在远程控制下,针对复杂血管网络,进行快速导航和微创手术(图一),为缺血性中风的治疗提供了重要的潜在工具。
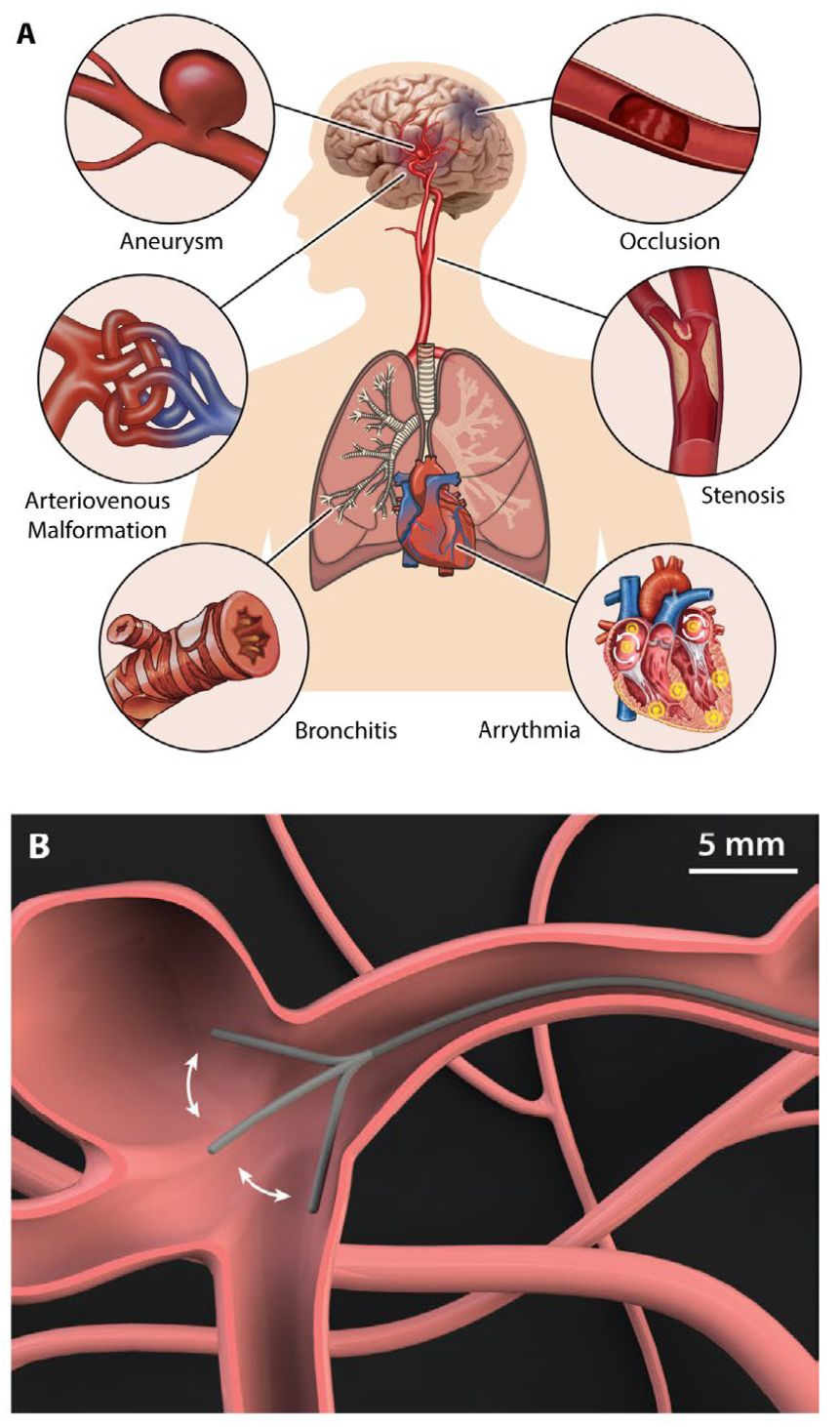
图一 : 磁控软体导丝机器人的应用领域。
1、血管介入微创手术
血管介入微创手术可通过扩张狭窄动脉、改善局部血供等途径有效预防、治疗缺血性血管病。该术式通常由医生在透视设备的辅助下,经血管利用导丝将球囊/支架送至动脉狭窄处,释放并扩张球囊/支架,以达到恢复血管正常生理解剖和局部血供的目的。导丝在球囊/支架推送过程中起到至关重要的作用。临床实践发现,由于目前所用导丝本身不具有方向选择性和动力,所以手术中依靠医生凭借经验通过手动旋转、推送导丝等操作不断调整球囊/支架(图二),使之到达患处。
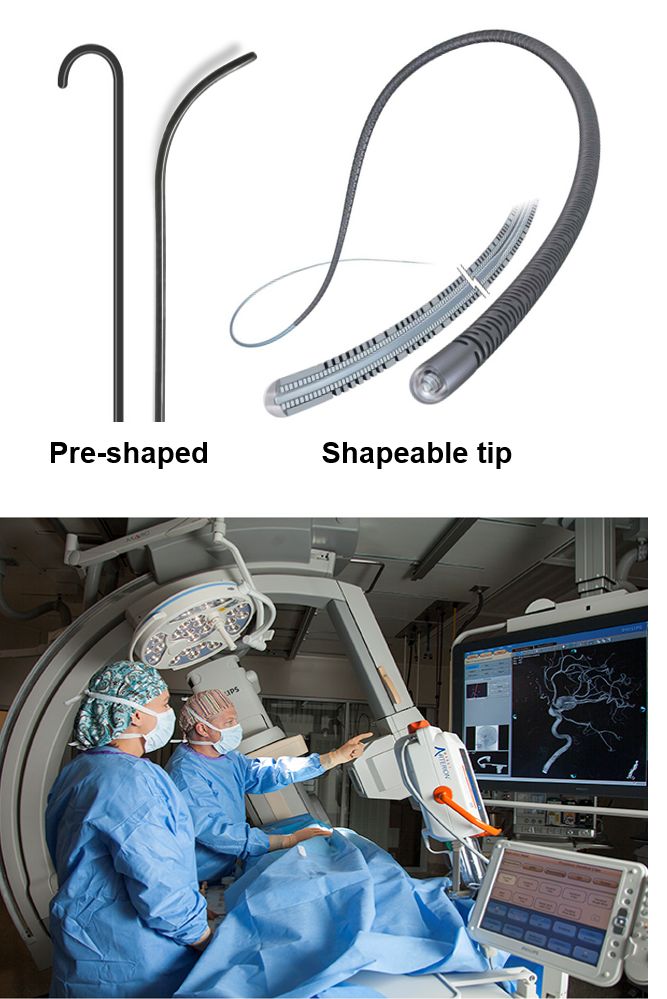
图二:现有脑血管介入手术的导丝和医生操作方法
基于以上特点,当前的手术方法主要有以下几个弊端:
-
手术时间较长。在血管交叉处需要手动旋转导丝,使其进入正确的分支,在导丝进入血管网络一段距离后,由于导丝与血管壁摩擦的影响,该操作很难一次成功,导致整个手术过程很长。然而急性缺血性脑血管病发病后早一秒重建缺血部位血液循环,患者受损伤的脑组织就更少,康复情况也会更好。
-
对医生辐射量较大。由于从事该手术的医生常年要在不间断造影下观察导丝前端运行到的位置,累积起来所受辐射会对其身体健康产生影响。
-
缺乏有经验的医生。血管介入性手术非常考验医生的操作水平,能熟练操作手术的医生数量远远少于病患所需。在偏远城市或农村地区,这种现象尤为突出。
2、远程磁控软体导丝机器人
针对当前血管介入微创手术的局限和弊端,MIT赵选贺团队首创磁控软体导丝机器人。有望帮助医生在远离放射源的远程控制下,针对复杂血管网络,进行快速导航和微创手术。磁控软体导丝机器人的发明是基于赵选贺团队在打印磁性智能软机器和医疗仪器水凝胶皮肤两个原创领域的成果 (图三)。

图三:磁控软体导丝机器人结合了MIT赵选贺团队在打印磁性智能软机器和医疗仪器水凝胶皮肤两个原创领域的成果。
赵选贺团队首先将铁磁软材料油墨打印成直径只有几十到几百微米的软体导丝,同时编辑软体导丝中铁磁畴的分布(例如,轴向极化)。然后在铁磁软体导丝上生长一层十几微米厚的水凝胶皮肤,减少铁磁软体导丝的摩擦系数十倍以上。在外加磁场的遥控下,铁磁软体导丝机器人可以向任意方向偏折、旋转,快速巡航复杂血管网络 (图四)。

图四: 磁控软体导丝机器人基于:A.打印铁磁软材料油墨成铁磁软体导丝,B.在导丝上生长超滑水凝胶皮肤,C.远程磁控铁磁导丝的形变。
赵选贺团队首先演示在外加磁场的控制下,铁磁软体导丝机器人可以快速准确的穿越一系列直径2~3毫米的密集排布的孔洞。全程无需手动扭转导丝。然后,赵选贺团队将铁磁软体导丝机器人应用在真人大小的脑血管模型中。该模型是通过CT扫描病人脑血管,然后由柔软硅橡胶3D打印而成。脑血管模型还灌注了血液模仿剂,模仿脑血管内的摩擦和粘性等环境。在外加磁场的控制下,铁磁软体导丝机器人可以快速巡航该复杂血管网络,最小血管内壁直径只有2.5毫米左右。在血管分叉处,外加磁场可以远程控制导丝机器人向需要前进的方向偏折,无需手动扭转导丝。在进入预定的血管后,导丝机器人前端又恢复直线形状,减少前进中和血管壁的摩擦。另外,导丝机器人在血管患处(例如,血管瘤)可以进行各种磁控形变,为进一步处理和治疗做准备。
相比之下,现有的手动导丝前进中在血管壁上有明显的拖行和摩擦。在分叉处需要手动扭转导丝来选择前进方向。前进过程比磁控软体导丝机器人慢很多,而且不能到达复杂的微小血管分叉。
赵选贺团队进一步展示了多功能磁控软体导丝机器人。例如,团队可以在磁控软体导丝机器人中加入光导纤维。这样当机器人达到患处时,有可能用激光来处理堵塞淤血等。在未来的工作中,团队希望在磁控软体导丝机器人中引入各种精准传感器,实现微流体给药、超声以及电治疗等功能。

3、大家点评
首尔国立大学著名教授、软体机器人未来科技中心主任Kyu-Jin Cho对磁控导丝机器人评论说:
“One of the challenges in surgery has been to be able to navigate through complicated blood vessels in the brain, which has a very small diameter, where commercial catheters can''t reach. This research has shown potential to overcome this challenge and enable surgical procedures in the brain without open surgery.
Many researchers have been developing microscale ferromagnetic soft robots to be used for medical purposes, but they are still in the stage of basic research. However, this research by Prof. Zhao has shown great potential of ferromagnetic soft robot to be used in practical surgical procedures by using traditional catheter/guidewire design combined with ferromagnetic material coated on the wire with a soft material. It is simple, more robust and safer in design, than other technologies that have been developed so far. This new continuum robot design is practical in many ways and should be able to address the issues that brain surgeons needed.”
4、作者展望
随着老龄化社会的到来,病患数量的增加和熟练手术医生的不足将成为越加尖锐的社会矛盾。5G网络和人工智能的成熟普及,有望为远程智能操控手术机器人提供技术平台,大大提高医生的效率和能力。因此遥控智能手术机器人的开发,已经成为一个有望解决社会重大需求的交叉性学科。同时,人体器官(例如大脑、脊髓、心脏、肌肉、皮肤等)大多是由软体材料组成的,因此软体机器人在和人体接触的应用中具有天然的优势。磁控软体导丝机器人兼具柔软性、微型化、3D打印、精准模型、远程控制、多功能等优势,为未来手术机器人的设计和制造指出了一个新方向。
团队简介
该工作由MIT赵选贺团队主导完成。通讯作者赵选贺博士是MIT终身教授。该工作的第一作者是赵选贺团队的博士生Yoonho Kim,其他作者有博士生German Parada和清华大学访问学生刘圣铎。MIT赵选贺团队(http://zhao.mit.edu)专注推动软材料和人机共融科技的发展,最近的成果包括:
机理研究
-
首次提出3D打印铁磁软材料和软机器 Nature, 558, 274 (2018)
-
首次实现超高抗疲劳断裂(anti-fatigue-fracture)水凝胶 Science Advances, 5: eaau8528 (2019);PNAS,116 (21) 10244-10249 (2019)
-
首次提出水凝胶超韧粘结 (tough adhesion)的机理并实现与各种材料的超韧粘结 Nature Materials, 15, 190 (2016)
-
首次提出坚韧水凝胶高弹体聚合物(tough hydrogel-elastomer hybrid)并实现不干水凝胶 (anti-dehydration hydrogel) Nature Communications, 7, 12028 (2016)
-
首次提出3D打印超韧超弹水凝胶的方法并打印各种载细胞的超韧超弹水凝胶结构 Advance Materials, 27, 4035 (2015)
-
首次提出可重复折叠大面积石墨烯 Nature Materials, 12, 321 (2013)
-
首次发现并解释电致褶皱(electro-creasing)和电致空穴(electro-cavitation)现象 Physical Review Letters, 106, 118301 (2011);Nature Communications, 3, 1157 (2012).
应用研究
-
首创铁磁软体导丝机器人,并遥控巡航复杂血管网络 Science Robotics, 4, eaax7329 (2019)
-
首创可食用水凝胶电子并用来长期监测核心体征 Nature Communications, 10, 493 (2019)
-
首创可拉伸水凝胶电子 Advanced Materials 28, 4497 (2016)
-
首创液压水凝胶驱动器和机器人 Nature Communications, 8, 14230 (2017)
-
首创超高拉伸水凝胶光纤 Advanced Materials, 28, 10244 (2016)
-
首次实现各种医疗仪器上的超韧水凝胶涂层 Advanced Healthcare Materials,6,1700520 (2017); Advanced Materials, 1807101 (2018)
-
首创并3D打印可拉伸生命器件 (stretchable living devices)PNAS, 114, 2200 (2017);Advanced Materials, 1704821 (2017)
-
首次应用力学失稳得到人工粘膜 PNAS, 115, 7503 (2018)
综述
-
定义水凝胶生物电子学(hydrogel bioelectronics) Chemical Society Review, 48, 1642 (2019)
-
系统阐述水凝胶增强 (high strength)的机理 Proceedings of the National Academy of Sciences, 114, 8138 (2017)
-
系统阐述多种水凝胶增韧(high toughness)的机理 Soft Matter, 10, 672 (2014)
- 港中大张立教授课题组联合港理大、港中大医学院《Sci. Adv.》:亚毫米磁控微导管技术用于提升血管内介入可达性和治疗效率 2025-06-23
- 武汉理工戴红莲、涂溶/华山医院陈天午 AFM:韧带修复者的福音 - 一种人工韧带制备的新方法 2024-10-14
- 华科大李亮教授、曹全梁教授团队 Nat. Commun.:微型磁控胶囊机器人实现多模态响应与多功能集成 2024-03-12
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 宾大杨澍团队、UCLA金丽华团队 Science:把“打结”变成动力 - 会跳、会翻、还能“飞回来的”软体微型驱动器 2026-04-24
