
在耶鲁大学科学家眼里,黏土不再是小孩桌面上的玩具,而是可自由变换形状的变形机器人。几个月前,耶鲁大学在机器人顶级会议ICRA发表了一篇论文,详细阐述了他们是如果让“黏土+机器人皮肤”变成变形机器人的。
作者:风雨抚蕖
一改机器人往日古板的形象,来自耶鲁大学的研究员通过黏土和机器皮肤制造出了变形机器人。通过挤压塑造成不同的形状,使得机器人能够在未来适应不同的环境完成不同的任务。

用黏土制作机器人,真的能像橡皮泥一样千变万化吗?
摆脱刚性结构,更易七十二变
想必大家非常熟悉各种变形机器人,不久前我们就报道了来自深海的变形金刚Aquanaut机器人。

通过结构性的改变,单个机器人能够执行更为丰富的任务。但是刚性结构的约束使得这些机器人只能在有限的形式间转换,软体机器人有可能改变这一切,没有固定的形式使得软体机器人能够将自己转化为任何形状,使他们能够执行需要的任务。
今年早些时候的ICRA上,耶鲁大学证实了通过泡沫黏土和机器皮肤创造机器人的可能性。
机器皮肤,秒变机器人
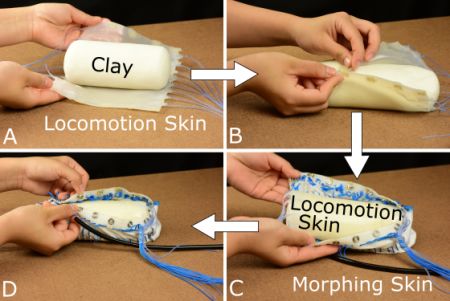
机器人本身由缠绕在一块粘土上的皮肤组成,其中的执行器由外接电源和控制装置驱动。在制作机器人的过程中,首先要准备一个黏土的圆柱体,然后给它穿上第一层皮肤。

接下来再给它穿上第二层皮肤。

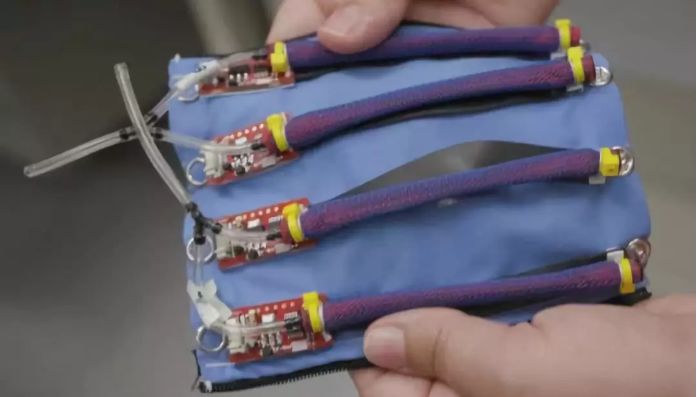
这层运动皮肤,由气动气囊网制成,当气囊按照特定的顺序充气时,机器人可以向前或者向后运动。
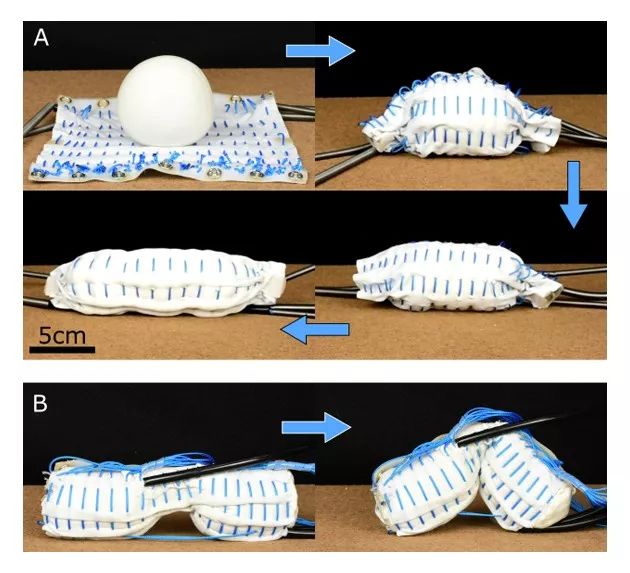
在他们的黏土机器人身上,最重要的是第二层变形皮肤,它们由电缆驱动,可以将底层材料塑造成各种形状,包括球体,圆柱体和哑铃。当遇到障碍时,变形皮肤可以改变机器人的形态,巧妙地避开障碍物,这是执行多种任务的核心。

挺胸收腹

越过山丘
循序渐进,由简进繁
其实,这并不是耶鲁大学第一次用运动皮肤帮助柔软的物体实现运动功能了。去年的《Science Robotics》就曾经发表过一篇论文,为毛绒玩具套上机器人皮肤,让它实现一定的运动功能。
机器皮肤

运动的小马哥
过去耶鲁大学的研究人员一直在试验使用弹性结构的变形机器人,由于是弹性形变,一旦动作停止,机器人就会弹回原来的形状。

但粘土是不同的,因为它会保持形成的任何形状,使机器人更节能,如果要变换成其它形态,只需要变形层施加压力改变即可。
目前该项研究的机器人形态较为简单,功能也没有那么丰富,但是正如耶鲁大学从运动皮肤、到黏土应用、再到变形皮肤的循序渐进,研究人员提出了一些可以在未来使用的更为复杂版本。
以下,可以观看这款机器人的完整视频:
助力探索
通过变形和运动的相互补充,使得该方法塑造的机器人具有独特的应用场景。在搜索和救援行动中,可以仅携带机器皮肤,而黏土则可以就地取材,这节省了更多的负载成本。

更广泛地说,在资源有限的条件下,例如在火星探索中,由于物资供应链稀少,利用这种变形系统,机节约了运载成本,也可以将物质机器人变形为不同的形式以执行不同的功能。
- 瑞典皇家理工学院Lars A. Berglund教授团队等 ACS Nano:纳米纤维素/纳米黏土复合薄膜干燥过程纳米结构演变 2023-09-10
- 美国西北大学黄嘉兴教授:石墨烯可以像“培乐多”黏土一样模塑成任何形状 2019-02-12
- 中科院兰州化物所研究员张俊平团队:基于硅烷和硅酸盐黏土矿物的特殊润湿性材料研究获进展 2017-12-13
- 深大王奔、港中大张立教授 NSR 综述:面向体内介入的微型机器人部署、导航与清除 2026-07-24
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
