气动人工肌肉(PAMs)是一种柔性流体驱动器,医疗、机器人、军事、航天等领域都发挥着重要作用。其组成包括气囊、编织套管、端部连接件以及压缩机、气泵等外接设备,导致体积庞大,限制了便携性和小型化应用。近年,利用内部压力控制(如燃烧、气液相变等)等策略开发的无缆气动人工肌肉,在小型化方面取得一定进展。但是利用类似天然肌肉含水量的水凝胶制备大形变、快响应的气动人工肌肉仍然存在挑战。这主要受限于传统水凝胶渗透压驱动机制,其形变依赖于聚合物网络溶胀/退溶胀,导致响应速度缓慢。此外,如何调控水凝胶驱动器的模量,满足其在一定气压下产生稳定形变,也是开发气动水凝胶人工肌肉的核心技术难点。
近日,武汉大学常春雨教授课题组提出一种小型化策略,构建具有突跳失稳特性的水凝胶,开发无缆PAMs。这种气动水凝胶人工肌肉在20 °C下加压至临界压力附近(稳定状态I),由于疏水相互作用和纤维素纳米晶体的存在,水凝胶具有高模量,仅发生轻微膨胀;当温度升高到70 °C时,水凝胶网络结构中疏水相互作用削弱,导致水凝胶的交联密度下降,模量降低,压力-体积曲线下移,内部气压超过临界压力,触发突跳失稳,水凝胶人工肌肉迅速膨胀至稳定状态II,径向驱动速度达200 % s?1,整个过程可在10秒内完成。该气动水凝胶无需外接压缩机和气泵,通过热刺激切换水凝胶模量变化,触发突跳失稳机制,实现无缆小型化驱动。此外,本文演示了小型化水凝胶PAMs在可控潜水装置和集成滚动机器人领域的应用,展现出感知和改变环境的能力,为仿生机器人的设计和发展提供新思路。
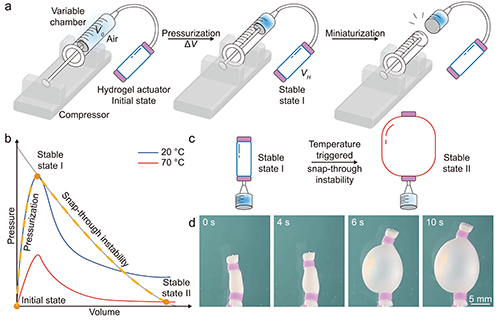
气动水凝胶人工肌肉的设计、形变机理及驱动过程
该工作以“Temperature-triggered inflatable hydrogel muscles with snap-through instability for untethered robots”为题,发表在《Nature Communications》上。武汉大学博士研究生崔言德为第一作者,武汉大学化学与分子科学学院常春雨教授和武汉大学中南医院李兵教授为通讯作者,武汉大学硕士研究生胡建华和董子扬为论文共同作者。该研究得到了国家自然科学基金(52073217,52373104)的资助。
论文链接:https://www.nature.com/articles/s41467-025-58731-4
课题组网页:https://www.x-mol.com/groups/Chang_cy
- 四川大学王云兵/胡成团队 AM:多肽工程化水凝胶用于修复缺血脑卒中后的组织损伤 2026-07-31
- 东北大学田野团队 AFM:液态金属基共晶水凝胶应变传感器实现超低滞后的人机交互与高精度手语识别 2026-07-27
- 西安交大李涤尘/贺健康教授团队 Adv. Mater.:水凝胶 “拉一拉” - 实现细胞有序排列 2026-07-23
- 郑大米皓阳教授、湖南工大经鑫教授 AFM:集成驱动与应变传感功能的梯度水凝胶 - 用于仿生机器人 2025-12-02
- 合工大胡颖、常龙飞/赵玉顺《Adv. Funct. Mater.》:静电振荡驱动的具有光调控运动的仿海豹柔性机器人 2025-08-09
- 科学家研制出三种可磁场控制的仿生机器人 2017-04-14
