两次眨眼就可放大镜头,再来两次眨眼即可缩小镜头,这是一款通过眼球活动来控制的柔性镜头。随着人眼环顾可左右旋转,眨眼可变焦。
这只是一个产品雏形,然而其中我们可以有极大的想象空间,它不一定非得是相机,可以是任何柔性机器。如果加上拍照功能,做成隐形眼镜,与谷歌眼镜等可穿戴装备合体的话,那么就是 007 詹姆斯·邦德的标配,或者是“终结者”的装备了。

(来源:DanielJurena/ Flickr / Wikimedia Commons)
这是第一次眼电信号控制软性机器的实现。7月16日,加州大学圣地亚哥分校(UCSD)机械与航空工程系副教授蔡盛强(Shengqiang Cai )团队的这项研究发表在材料学期刊 Adv Funct Mater 上。
眼电信号来控制
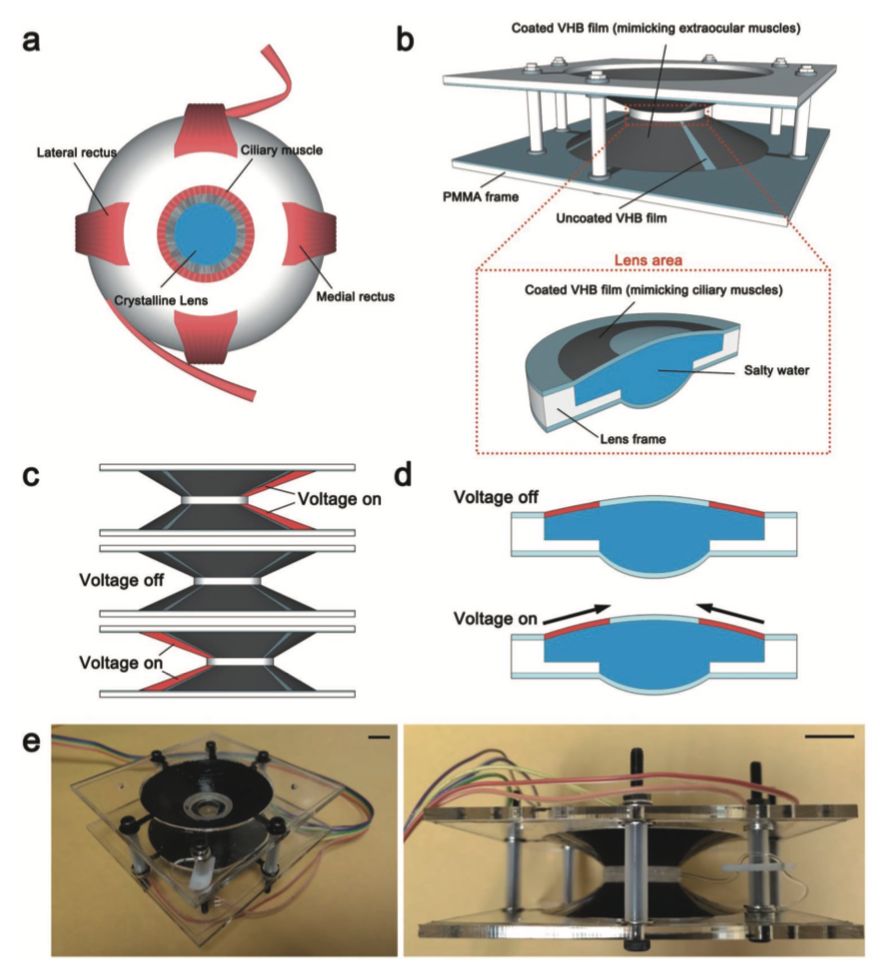
图丨仿生软镜片的设计与制作:a)人眼的示意图。眼外肌控制眼球的运动,晶状体的焦距可以通过环状睫状肌的收缩而改变。b)仿生软镜片的设计。两个 DE 膜和镜片形成双锥形结构,每一个 DE 膜都具有 4 个独立的活动区域,环形碳油脂电极涂覆在镜片表面的顶部,盐水则作为另一个电极。c)当在一侧上的一对 DE 薄膜上施加电压时(如红色所示),可以通过 DE 薄膜的膨胀引起透镜的平面移动。d)镜片中环形 DE 膜的膨胀可以减小两侧膜的曲率,从而增加镜片的焦距。(来源:Adv Funct Mater)
这款相机利用的原理是眼电信号。人眼的角膜与视网膜之间存在电势差,当眼球运动时,角膜与视网膜之间的电势差会随眼球运动而不断变化,这个即眼电信号。眼动信号测量技术成本低,且测量精确,容易实现长时间记录以及更适合应用于可穿戴设备。
软镜头外壳是电活性的聚合物薄膜,也是电介质柔性膜(DE 膜)。镜头内容物盐水相当于人眼的晶状体,这样就可以模仿眼睛结构。
环形碳油脂电极涂覆在镜片表面的顶部,盐水则作为另一个电极。软透镜的变焦和运动是通过 DE 膜的电势诱导实现的。聚合物外壳凸起的话就相当于变焦,镜头的聚合物环以膨胀或收缩来移动镜片。
受试者眼睛周围有 5 个电极线,这样就可以感知眼球中的电位,当受试者眼球上下左右活动时,镜头会相应移动。
由于 DE 膜可以快速响应,软镜片的运动和变形可以很容易与眼睛运动同步。经过程序设定后,当用户眨眼两次即可实现镜头放大,再次眨眼两次后,则是镜头缩小。
目前的这个软镜头并非是可佩戴设备,5 根电极线连接人眼周围的肌肉,软镜头是离开人体的。这个距离科幻片里的可佩戴智能镜头还有工业实现的距离。
专访蔡盛强:任何生物信号都可以用来做接口
记者:这是一个相机,还是说是个眼镜装置,怎么定性它呢?
蔡盛强:都可以。我们相当于是做了一个很原始的模型,就看你想往哪边应用了。想做成相机可以,想做成眼镜也可以。
记者:这个软镜头能够快速响应,为什么能响应这么快?
蔡盛强:传统机器人基本上都是马达或者齿轮驱动,而软体机器人需要用到 DE 膜,这就相当于人的肌肉, 眼电电压可以用来控制其变形和移动。
记者:与此前的软镜头研究相比,你们的突破体现在什么地方?
蔡盛强:其实用软镜头我们并不是第一家,但我们这次有两个大的突破。
首先我们是仿生了人眼,在柔性材料和镜头结构上做了创新。相机的变焦需要很大的空间来操控,而人的眼球是软的,可以通过肌肉的微控制来实现变焦。这里用到两组人造肌肉,一组用来控制眼球的上下左右运动,一组用来控制收缩和伸张,就是变焦。
其次,我们是第一次用眼电信号来操控软镜头运动和变焦。由于使用柔软材料,透镜焦距的相对变化可以通过变形达到 32%。
记者:怎么看待软镜头的信号误判?
蔡盛强:生物信号总是有一些噪音,或者是有一些不确定性之处,所以我们信号处理的时候,误判在所难免。
如果信号中的峰值或谷值未被识别出,镜片可能会移动到相反方向,或没有触发镜头移回。眼动有时也可能被误判为双眨眼,导致镜头意外变焦。
目前信号判断准确率能达到 90%,能采取的纠错机制就是你就再来一遍操作,就好比电脑死机,我们就提供一个重启机制。
记者:这个产品雏形还有哪些改进之处?
蔡盛强:这毕竟是产品雏形。比如说我们用的电极线是直接买的商业电极线,它既不是非常柔软也不是可拉伸的,如果能换成柔性更好的电极线,对于生物信号捕获和处理更有效,以及人的舒适度也会高很多。
还有我们软镜头内容物是盐水,透镜的球形形状和流体的均匀折射率导致光学像差。实际上人眼晶状体的折射率还是有梯度的,其折射率并非均匀,那么我们可以换成水凝胶,就可以做成有梯度的材料。
对于这个 10% 以内的误判率,我们可以再加一套生物信号比如语音,让两套生物信号来控制就可以降低误判率。
记者:现在有没有在尝试,下一步做成什么产品吗?
蔡盛强:没有,因为我们强项不在那个地方,到下一步真正的产品还是有距离的,但这不是大学研究的强项。当然,有不少人联系我们询问,其中有医生给我们发邮件,问这个装置能不能帮我们解决一下白内障问题。
记者:如何看待这个作品的商业前景?
蔡盛强:我们没有太去注重生产工艺,那也并不是我们的强项,我们更看重创新点。当然下一步如果有产业界和我们合作,我们是有意愿的。
图 | 脉搏信号也可以用来操控装置。(来源:蔡盛强)
记者:马斯克也在研究脑机接口,也是人机界面的研究,跟你们眼电信号研究相对比,你觉得有什么比较吗?
蔡盛强:我觉得他那个脑机接口研究更商业化,相对脑电波,眼电信号的研究更为明确。虽然我选择的是眼电信号,然后用在了软的透镜上,其实任何生物信号都可以用来做接口,比如说我们也在尝试用心电信号做一个装置,可以像心脏那样跳动。
蔡盛强(Shengqiang Cai ),加州大学圣地亚哥分校(UCSD)机械与航空工程系副教授。毕业于中国科技大学力学与机械工程系,于 2011 年获得哈佛大学机械工程专业的博士学位,并于 2011 年到 2012年 在麻省理工学院从事博士后工作。主要从事研究领域包括软材料力学、固体的电化学力学、能源材料力学、仿生学设计和生物力学、3D 制作等。
-End-
参考:
https://www.newscientist.com/article/2211334-a-robotic-lens-can-be-controlled-by-simply-looking-around-or-blinking/
https://onlinelibrary.wiley.com/doi/epdf/10.1002/adfm.201903762?referrer_access_token=D7c1SsULTUUsZm5P86E5OE4keas67K9QMdWULTWMo8Nt-T6CojEAo2uxOeXxvsKJBahv1uMcC3TXX_0bVdVy5OsJMIhbXtVppQH0jesz9uh5zgCBdxadPUf_a9iOmAcRNBpcBdjEiIUFFT52pXBdKhnYKqXu_G5I1MVRbQxT-_0%3D
