当前人工智能快速发展,各种类人功能智能机器人层出不穷,触觉感知是人类和未来智能机器探索物理世界的基础性功能之一,发展具有触觉功能的仿生电子皮肤柔性感知器件,并实现器件与柔软组织间的机械匹配性具有重要的科学意义和应用价值。
受指纹能够感知物体表面纹理的启发,中国科学院苏州纳米所张珽研究员团队在前期研究基础上(Nano Research 2017, 10(8): 2683-2691),采用内外兼具金字塔敏感微结构的柔性薄膜衬底及单壁碳纳米管导电薄膜,设计与制备了具有宽检测范围(45-2500 Pa)、高灵敏度(3.26 kPa-1)的叠层结构柔性振动传感器件-(图1b)。并建立了其摩擦物体表面时振动频率与物体表面纹理粗糙度的模型:f = v/λ(图1;v:柔性传感器相对速度运动;f:振动频率;λ:起伏间距即波长)。该柔性仿生指纹传感器可应用于物体表面精细纹理/粗糙度的精确辨别,最低可检测15 μm×15 μm的纹路,超过手指指纹的辨识能力(~50 μm×50 μm)。也能够实现对切应力、及盲文字母等高灵敏检测与识别,这些特性将在机器人电子皮肤的触觉感知、智能机械手等方面有重要潜在应用。相关结果已发表在Small (2018, 1703902, 1-9; DOI: 10.1002/smll.201703902),并被Advanced Science News以“A New Bionic Skin; Makes Sense”为标题报道(图2),论文第一作者是硕士研究生曹玉东和李铁博士。
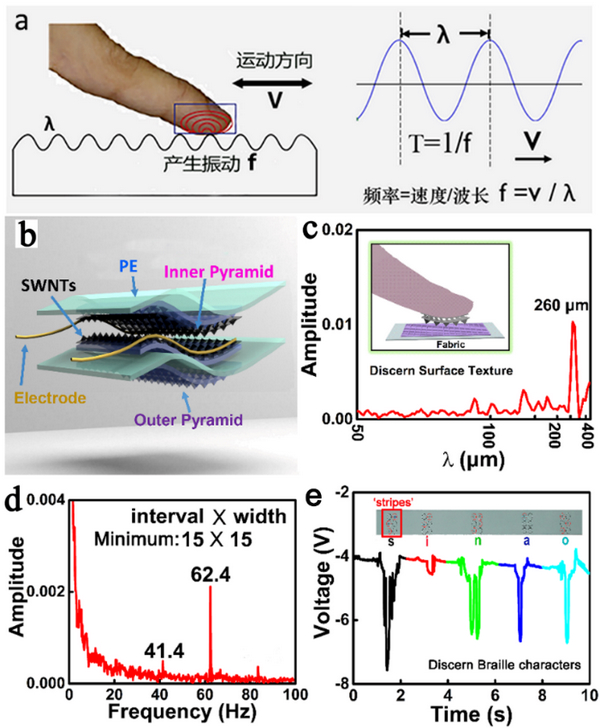
图1. (a)手指粗糙度触觉感知仿生模型;(b)叠层结构柔性指纹传感器模型;(c)柔性传感器实现仿手指指纹织物纹理响应及其(d)最小粗糙度感知与(e)对盲文字母感知。

图2 Advanced Science News对仿生指纹柔性传感器报道
作为柔性可穿戴电子,器件与柔软组织间的机械不匹配是该领域需要解决的关键科学问题之一。针对上述关键科学问题,近期张珽研究员团队报道了一种具有褶皱核鞘结构的纤维状超延展柔性应变传感器,该传感器在全工作范围内有高灵敏度,既可以对微弱应变又可以对大应变有良好的响应。依据模型,
 ,
, ,
,  ,(H:褶皱振幅,h:鞘层厚度,epre:纤维核预应变,ec:纤维核材料产生褶皱的临界应变,l:褶皱波长,hs:鞘层单层薄膜的厚度,n:鞘层薄膜层数),通过预拉伸-包裹-释放策略可控的引入褶皱结构,这些褶皱相互接触构成了额外的接触电流通路(图3)。该导电通路会在器件被拉伸的过程中因褶皱分开而发生明显的变化,加之鞘层为对应变敏感的MWCNT/TPE复合薄膜,因此该应变传感器在极大的应变范围内(> 1135%)均具有高灵敏度(GF: 21.3, 0%-150%; 34.22, 200%-1135%)。这些优异的性能赋予了超延展应变传感器对微小肌肉运动以及大范围的关节运动实时监测的能力,同时也可应用于植入医疗,如用于数字化评定肌腱康复(图4)。该研究成果近期发表于Advanced Science (DOI: 10.1002/advs.201800558),文章第一作者是博士研究生李连辉。
,(H:褶皱振幅,h:鞘层厚度,epre:纤维核预应变,ec:纤维核材料产生褶皱的临界应变,l:褶皱波长,hs:鞘层单层薄膜的厚度,n:鞘层薄膜层数),通过预拉伸-包裹-释放策略可控的引入褶皱结构,这些褶皱相互接触构成了额外的接触电流通路(图3)。该导电通路会在器件被拉伸的过程中因褶皱分开而发生明显的变化,加之鞘层为对应变敏感的MWCNT/TPE复合薄膜,因此该应变传感器在极大的应变范围内(> 1135%)均具有高灵敏度(GF: 21.3, 0%-150%; 34.22, 200%-1135%)。这些优异的性能赋予了超延展应变传感器对微小肌肉运动以及大范围的关节运动实时监测的能力,同时也可应用于植入医疗,如用于数字化评定肌腱康复(图4)。该研究成果近期发表于Advanced Science (DOI: 10.1002/advs.201800558),文章第一作者是博士研究生李连辉。
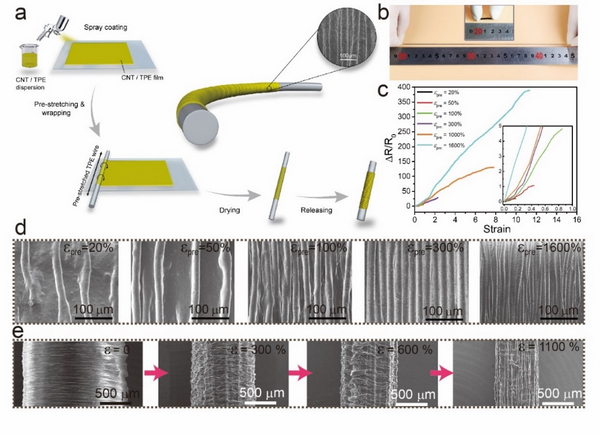
图3. (a)纤维状超延展应变传感器的制备流程示意图;(b)器件拉伸光学照片;(c)不同预拉伸条件下得到器件的应变电阻变化曲线;(d)不同预拉伸条件下得到器件的表面形貌;(e)应变传感器拉伸过程中的表面形貌。

图4. (a)由纤维超延展应变传感器制作的手环对手臂做不同动作进行实时监测的电阻变化曲线;(b)纤维超延展应变传感器监测喉咙肌肉的变化曲线;(c)纤维应变传感器绑定于大鼠肌腱上的光学照片;(d)大鼠腿部不同动作的示意图;(e)器件对大鼠腿部动作的响应。
上述工作得到了国家自然科学基金(61574163),江苏省杰出青年基金(BK20170008)和中国博后基金(2017M611945)的支持。
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 郑州大学申长雨、刘春太团队 AFM:多模态柔性传感器实现触觉与生物电感知集成 - 推动人机交互新发展 2026-04-24
- 南京林业大学杨蕊副教授 Carbohyd. Polym.:木基高强度粘附性导电水凝胶用于柔性传感器 2025-09-28
- 哈工大(深圳)何思斯团队 AM:高性能全聚合物水系准固态纤维电池 - 为透气可穿戴设备提供可靠能源 2026-06-05
- 中山大学付俊教授团队 AFM 综述:超薄可穿戴柔性电子器件及其智能健康监测应用研究进展 2026-05-30
- 武汉大学吴伟教授团队 AFM:用于下一代自适应可穿戴设备的全印刷温度-压力双模传感电子织物 2026-04-22
