日前,英国著名期刊《Nature》上发布了一款由德国马普智能系统研究所研制的磁控软体机器人,能够进行不同形式的运动。
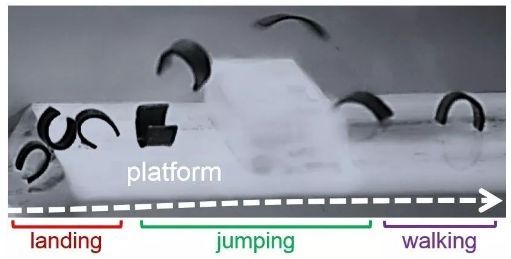
这是一段长3.7毫米、宽1.5毫米、厚185微米的长方体机器人。别小看这个外表上看起来黑乎乎的小方片,它能在磁场的控制下,像软体动物一样完成各种指定动作。比如在水下或水面游泳、卷成圆圈滚动、跳过障碍物、在细管中爬行,灵活切换各种运动形式等等。
这款机器人的主体材料为硅胶,内嵌具有磁性的汝铁硼微颗粒,颗粒的平均直径为5微米。机器人表面是防水的,也可以被处理成生物相容材料。机器人事先被设定成单波长谐波磁剖面,可以在随时间变化的磁场控制下改变自身的形态,并能根据地形的不同产生不同的运动模式。
由于这款机器人具有可控性,所以它能在人类的控制下完成装货、运货和卸货的操作,未来可以应用于人类人靶向药物的运输。
这款机器人能够适用于不同地形表现在很多方面,比如在通过狭小空间时,它能像毛毛虫一样产生波形震动,爬进去。
在水中通过在C形和V形之间变换姿态,像水母一样学会游泳。靠近岸边时机器人可以保持C形旋转滚离水面。值得一提的是,其滚动的表现也是在学毛毛虫躲避捕食者时的动作。
此外遇到比较高的障碍物时,还可以选择跳跃的方式。总之为了显示该软体机器人在各种不规则环境中的工作能力,研究人员让机器人开启了多种运动模式探索水陆双栖场景和人类胃部模型,并额外完成了抓取物体、定向转移的任务。
有意思的是,小编在查阅这款软体机器人的相关资料时,还意外的收获了马普智能系统研究所制作这款软体机器人的大致过程。怎么说呢这个过程像极了很多女生在调制一款粉末面膜时的动作。过程是这样的:把适量硅胶和汝铁硼微颗粒倒到容器中,用搅拌棒将其搅拌均匀,待其成为黏性膏状物时,均匀的涂抹在有标定厚度的玻璃板上。待膏状物晾干后,用类似于激光的工具,准确的切割出想要的尺寸。

切割完,就可以用镊子将相应的材料取下来了。
所以,看完实体的制作过程,便会发现,这款机器人的技术关键貌似并不是如何制作一个物理意义上的机器人,而在于如何精准的控制这只机器人。要产生怎样的磁场才能控制这只机器人做出相应的动作呢?小编我也期待有大神能出来解释一下啊。
总之,在人体内不需要任何物理干预便能运动的软体机器人,对体内医疗机器人来说是一个很好的研究方向,只是人体内部环境极其复杂,想要真正达到应用水平还真是任重而道远啊。不过这项工程学论文能收录在《Nature》上,也能看出其研究的重要意义。
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
