北京航空航天大学与国外一家公司近日合作研制成功软体章鱼触手机器人,未来将应用于工业、医疗、康复、服务等领域。


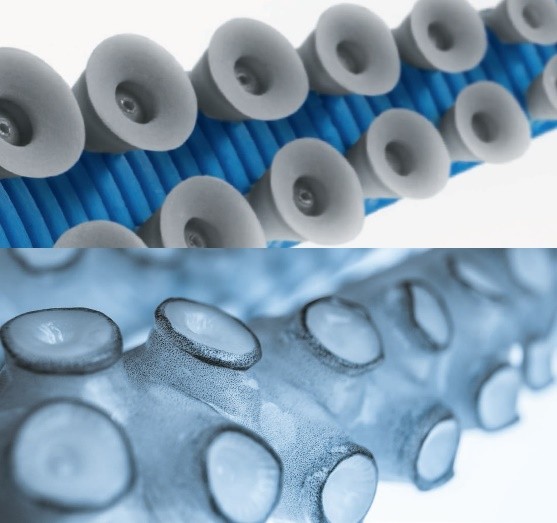
此次由北航智能技术与装备研究中心软体机器人实验室与国外合作研制的仿生机器人样机是一款软体章鱼触手机器人。仿生软体触手从自然界中的头足纲软体动物(如章鱼、乌贼等)的生理结构获得灵感,由接近生物软组织材料组成。传统刚性机器人主要由刚性材料(如金属,陶瓷,工程塑料等高杨氏模量硬度)制成,具有控制难度大,成本高,安全性低等不足。在操作软质、易碎、形状复杂、尺寸变化的物体时往往表现出效率低、安全性差、易损目标物等缺点。仿生软体触手可快速实现其弯曲缠绕运动,内侧分布的吸盘可有效地吸附物体,将吸附与缠绕两种方式结合,实现对多种不同形状,不同尺寸、不同摆放姿态物体的安全、无损、稳定抓持。

软体机器人是一项材料、力学、生物学、自动化等多学科的交叉研究,也是目前国际学术界的前沿热点。机器人领域著名专家,杰青、长江学者王田苗教授表示:相比传统刚性体机器人,软体机器人具备的柔性使其可以更加高效、安全地与人类和自然界进行交互;软体机器人未来还可以应用到服务、医疗康复等领域。
据介绍,软体章鱼触手机器人样机的设计、制造、力学分析、控制系统均由北航在校研究生完成,项目负责人为北航机械工程与自动化学院副教授文力。
中国科学院自动化研究所研究员、仿生机器人研究专家喻俊志认为,该仿生软体机器人的研究不仅有助于揭示自然界生物在材料、力学、运动学方面的科学原理,还有利于推动新材料与机器人产品的研发。
该项目获得了德国Festo“仿生软体章鱼触手”,国家自然科学基金重点项目“基于软体机器人的水下环境感知与目标抓取”,北航青年拔尖人才项目的支持。
- 四川大学丁明明教授团队《Adv. Sci.》:仿生聚电解质构象转导放大用于铁代谢超灵敏成像 2026-08-03
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 深大王奔、港中大张立教授 NSR 综述:面向体内介入的微型机器人部署、导航与清除 2026-07-24
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
